Simple Lane Detection

About
Simple lane detection (SLD) is, as the name suggests, is software that does simple lane detection. SLD achieve this by just using classical computer vision methods, consisting of: AOI, Thresholding, Canny line detection, HoughLinesP, & point clustering. Using these methods, the detection of the left and right lane(s) of the driving car in the video (point of view) is achieved.
Limitations
It really only works best if the video data is clean, there are no objects/cars in the AOI, and the road is in ok condition. Another big limitation of SLD is that it can only detect the first left and/or first right lane(s) of the main vehicle. It will not detect all the lanes, which limits what the code can provide for the car’s overall point of view. Here is a diagram/figure that highlights the main issues with SLD:
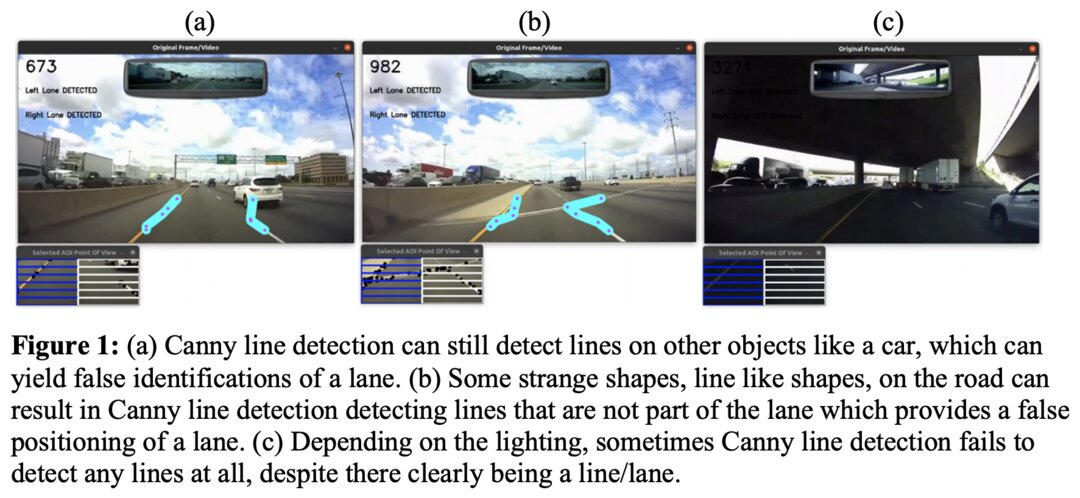
SLD is NOT perfect!
Demo Of SLD
All Sources
Research Papers
- Advanced lane detection technique for structural highway based on computer vision algorithm
- Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
- Real-Time Lane Departure Detection Based on Extended Edge-Linking Algorithm
Driving Clips
- Many clips were edited using youtube-dl and iMovie
- Self Driving Car Complete Dataset
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Other Sources
- OpenCV Canny Edge Detection Doc
- OpenCV Hough Line Transform Doc
- OpenCV Smoothing Images Doc
- StackOverflow Detect Mouse Position Click - Discussion
- Theses functions from CSOM’s CSCI437 class were modified & used in this project:
get_xy() ; create_named_window()