简单车道检测

关于
简单车道检测(SLD),顾名思义,就是执行简单车道检测的软件。SLD 通过仅使用传统计算机视觉方法来实现这一点,这些方法包括:AOI、阈值处理、Canny 线检测、HoughLinesP 和点聚类。使用这些方法,可以检测视频中(主观视角)驾驶车辆的左侧和右侧车道。
局限性
它只有在视频数据干净、AOI 中没有物体/车辆,并且道路状况良好的情况下才能真正达到最佳效果。SLD 的另一个重大局限是,它只能检测主车辆的第一条左侧和/或第一条右侧车道。它不会检测所有车道,这限制了代码对车辆整体视角所能提供的内容。下面是一张突出显示 SLD 主要问题的图表/示意图:
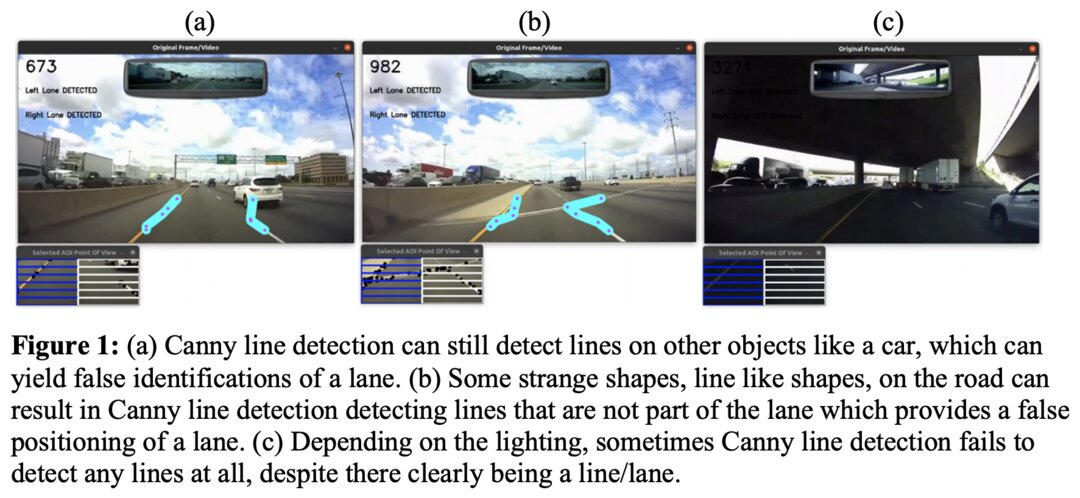
SLD 并不完美!
SLD 演示
所有来源
研究论文
驾驶片段
- 许多片段使用 youtube-dl 和 iMovie 进行了编辑
- 自动驾驶汽车完整数据集
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
其他来源
- OpenCV Canny 边缘检测文档
- OpenCV Hough 线变换文档
- OpenCV 图像平滑文档
- StackOverflow 检测鼠标位置点击 - 讨论
- 本项目修改并使用了 CSOM 的 CSCI437 课程中的以下函数:
get_xy() ; create_named_window()