Phát hiện làn đường đơn giản

Giới thiệu
Phát hiện làn đường đơn giản (SLD) đúng như tên gọi của nó, là phần mềm thực hiện phát hiện làn đường đơn giản. SLD đạt được điều này chỉ bằng cách sử dụng các phương pháp thị giác máy tính cổ điển, bao gồm: AOI, ngưỡng hóa, phát hiện đường Canny, HoughLinesP, và phân cụm điểm. Bằng cách sử dụng các phương pháp này, việc phát hiện làn đường bên trái và bên phải của xe đang lái trong video (góc nhìn) được thực hiện.
Hạn chế
Nó thực sự chỉ hoạt động tốt nhất nếu dữ liệu video sạch, không có đối tượng/xe hơi nào trong AOI, và mặt đường ở tình trạng ổn. Một hạn chế lớn khác của SLD là nó chỉ có thể phát hiện làn đường đầu tiên bên trái và/hoặc làn đường đầu tiên bên phải của xe chính. Nó sẽ không phát hiện tất cả các làn đường, điều này giới hạn những gì mã nguồn có thể cung cấp cho tổng thể góc nhìn của xe. Dưới đây là một sơ đồ/hình ảnh làm nổi bật các vấn đề chính với SLD:
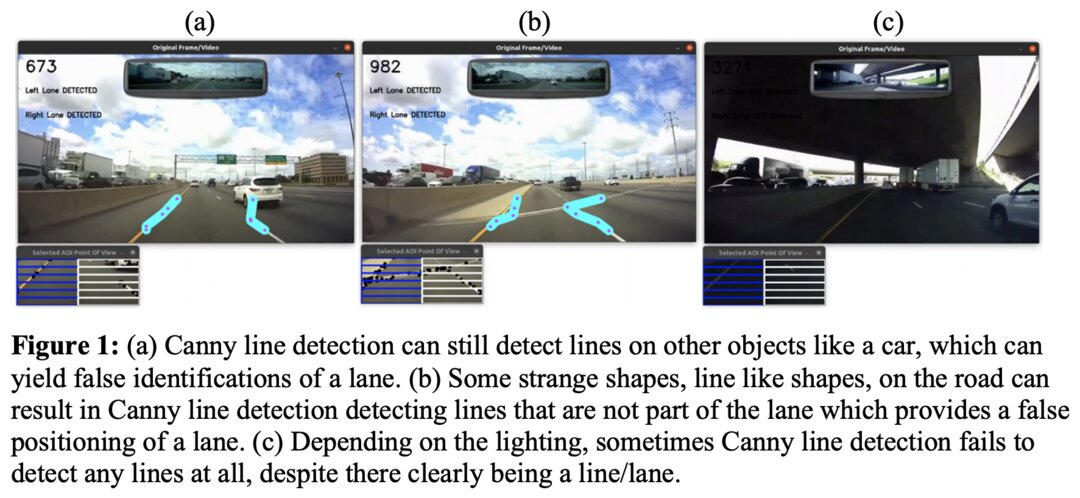
SLD KHÔNG hoàn hảo!
Bản demo của SLD
Tất cả nguồn
Các bài báo nghiên cứu
- Kỹ thuật phát hiện làn đường tiên tiến cho đường cao tốc có cấu trúc dựa trên thuật toán thị giác máy tính
- Phát hiện làn đường thời gian thực và lập kế hoạch chuyển động trên Raspberry Pi và Arduino cho một nguyên mẫu xe tự hành
- Phát hiện lệch làn đường thời gian thực dựa trên thuật toán liên kết biên mở rộng
Các đoạn lái xe
- Nhiều đoạn clip đã được chỉnh sửa bằng youtube-dl và iMovie
- Bộ dữ liệu đầy đủ cho xe tự lái
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Các nguồn khác
- Tài liệu phát hiện biên Canny của OpenCV
- Tài liệu biến đổi đường Hough của OpenCV
- Tài liệu làm mượt ảnh của OpenCV
- StackOverflow Phát hiện vị trí nhấp chuột - Thảo luận
- Các hàm này từ lớp CSCI437 của CSOM đã được sửa đổi và sử dụng trong dự án này:
get_xy() ; create_named_window()