Просте виявлення смуг
Про
Просте виявлення смуг (SLD) — як випливає з назви, це програмне забезпечення, яке виконує просте виявлення смуг. SLD досягає цього, використовуючи лише класичні методи комп’ютерного зору, що включають: AOI, порогову обробку, виявлення ліній Canny, HoughLinesP та кластеризацію точок. Використовуючи ці методи, здійснюється виявлення лівих і правих смуг автомобіля у відео (точка зору).
Обмеження
Він дійсно працює найкраще, якщо відеодані чисті, у AOI немає об’єктів/автомобілів, і дорога у задовільному стані. Інше велике обмеження SLD полягає в тому, що він може виявляти лише першу ліву та/або першу праву смугу головного транспортного засобу. Він не виявляє всі смуги, що обмежує те, що код може надати з точки зору автомобіля. Ось діаграма/рисунок, який підкреслює основні проблеми SLD:
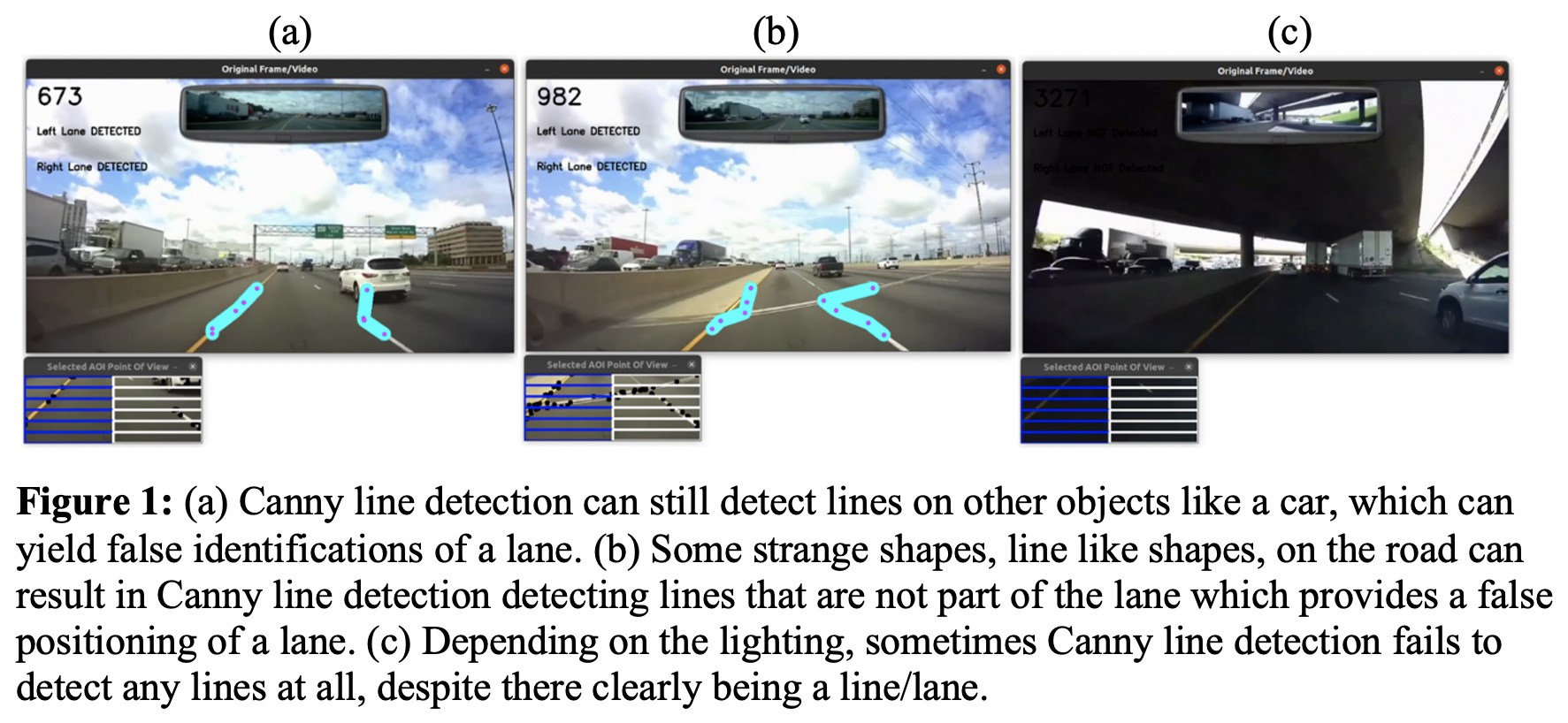
SLD НЕ є ідеальним!
Демонстрація SLD

Усі джерела
Дослідницькі статті
- Розширена техніка виявлення смуг для структурної автомагістралі на основі алгоритму комп’ютерного зору
- Виявлення смуг у реальному часі та планування руху на Raspberry Pi та Arduino для прототипу автономного транспортного засобу
- Виявлення відхилення смуги у реальному часі на основі розширеного алгоритму з’єднання країв
Кліпи водіння
- Багато кліпів було відредаговано за допомогою youtube-dl та iMovie
- Повний набір даних самокерованого автомобіля
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Інші джерела
- Документація OpenCV Canny Edge Detection
- Документація OpenCV Hough Line Transform
- Документація OpenCV Smoothing Images
- StackOverflow Detect Mouse Position Click - Обговорення
- Ці функції з класу CSCI437 CSOM були змінені та використані в цьому проєкті:
get_xy() ; create_named_window()