Basit Şerit Algılama

Hakkında
Basit şerit algılama (SLD), adından da anlaşılacağı üzere, basit şerit algılama yapan bir yazılımdır. SLD bunu yalnızca şu klasik bilgisayar görmesi yöntemlerini kullanarak başarır: AOI, Eşikleme, Canny çizgi algılama, HoughLinesP ve nokta kümelendirme. Bu yöntemler kullanılarak, videodaki sürücü aracın sol ve sağ şeridi/şeritlerinin (bakış açısı) algılanması sağlanır.
Sınırlamalar
Gerçekten en iyi şekilde yalnızca video verileri temiz olduğunda, AOI içinde hiçbir nesne/araba olmadığında ve yolun durumu fena olmadığında çalışır. SLD’nin bir diğer büyük sınırlaması da ana aracın yalnızca ilk sol ve/veya ilk sağ şeridi/şeritlerini algılayabilmesidir. Tüm şeritleri algılamaz; bu da kodun aracın genel bakış açısı için sağlayabileceklerini sınırlar. İşte SLD ile ilgili ana sorunları vurgulayan bir diyagram/şekil:
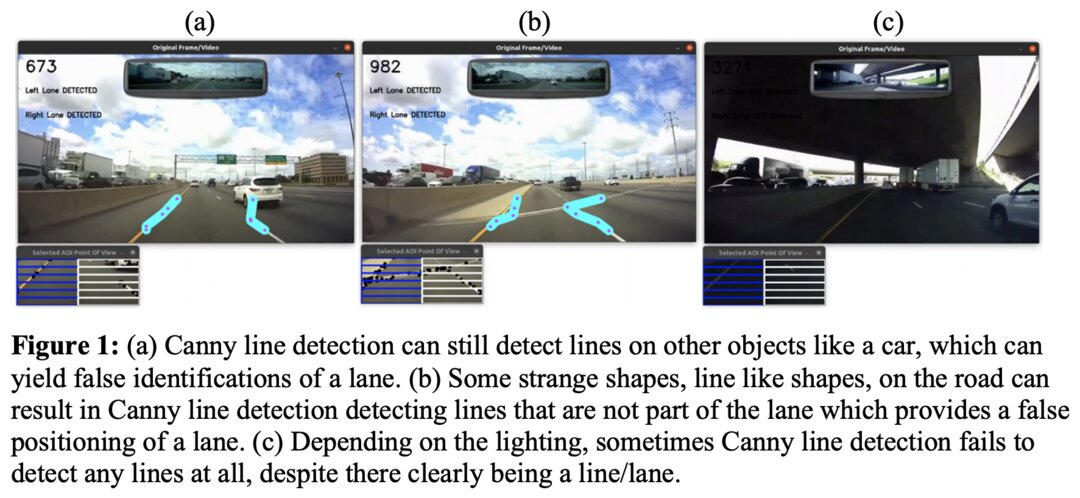
SLD mükemmel DEĞİLDİR!
SLD’nin Demosu
Tüm Kaynaklar
Araştırma Makaleleri
- Yapısal otoyol için bilgisayar görmesi algoritmasına dayalı gelişmiş şerit algılama tekniği
- Otonom bir araç prototipi için Raspberry Pi ve Arduino üzerinde gerçek zamanlı şerit algılama ve hareket planlama
- Genişletilmiş Kenar-Bağlama Algoritmasına Dayalı Gerçek Zamanlı Şerit Ayrılma Algılama
Sürüş Klibleri
- [Birçok klip youtube-dl ve iMovie kullanılarak düzenlendi]
- Kendi Kendine Sürüş Arabası Tam Veri Kümesi
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Diğer Kaynaklar
- OpenCV Canny Kenar Algılama Belgesi
- OpenCV Hough Çizgi Dönüşümü Belgesi
- OpenCV Görüntü Yumuşatma Belgesi
- StackOverflow Fare Konumunu Tıklama ile Algılama - Tartışma
- CSOM’un CSCI437 sınıfından alınan şu fonksiyonlar değiştirilmiş ve bu projede kullanılmıştır:
get_xy() ; create_named_window()