Basit Şerit Algılama
Hakkında
Basit şerit algılama (SLD), adından da anlaşılacağı gibi, basit şerit algılaması yapan bir yazılımdır. SLD, sadece klasik bilgisayarlı görü yöntemlerini kullanarak şu bileşenlerden oluşur: AOI, Eşikleme, Canny hat algılama, HoughLinesP ve nokta kümelenmesi. Bu yöntemler kullanılarak, videodaki (bakış açısı) sürüş arabasının sol ve sağ şerit(ler)inin tespiti sağlanır.
Sınırlamalar
Gerçekten en iyi şekilde yalnızca video verisi temiz olduğunda, AOI içinde nesne/araba olmadığında ve yol iyi bir durumda olduğunda çalışır. SLD’nin bir diğer büyük sınırlaması, yalnızca ana aracın ilk sol ve/veya ilk sağ şerit(ler)ini tespit edebilmesidir. Tüm şeritleri tespit etmez, bu da kodun arabanın genel bakış açısına sağlayabileceği şeyi sınırlar. İşte SLD ile ilgili ana sorunları vurgulayan bir diyagram/şekil:
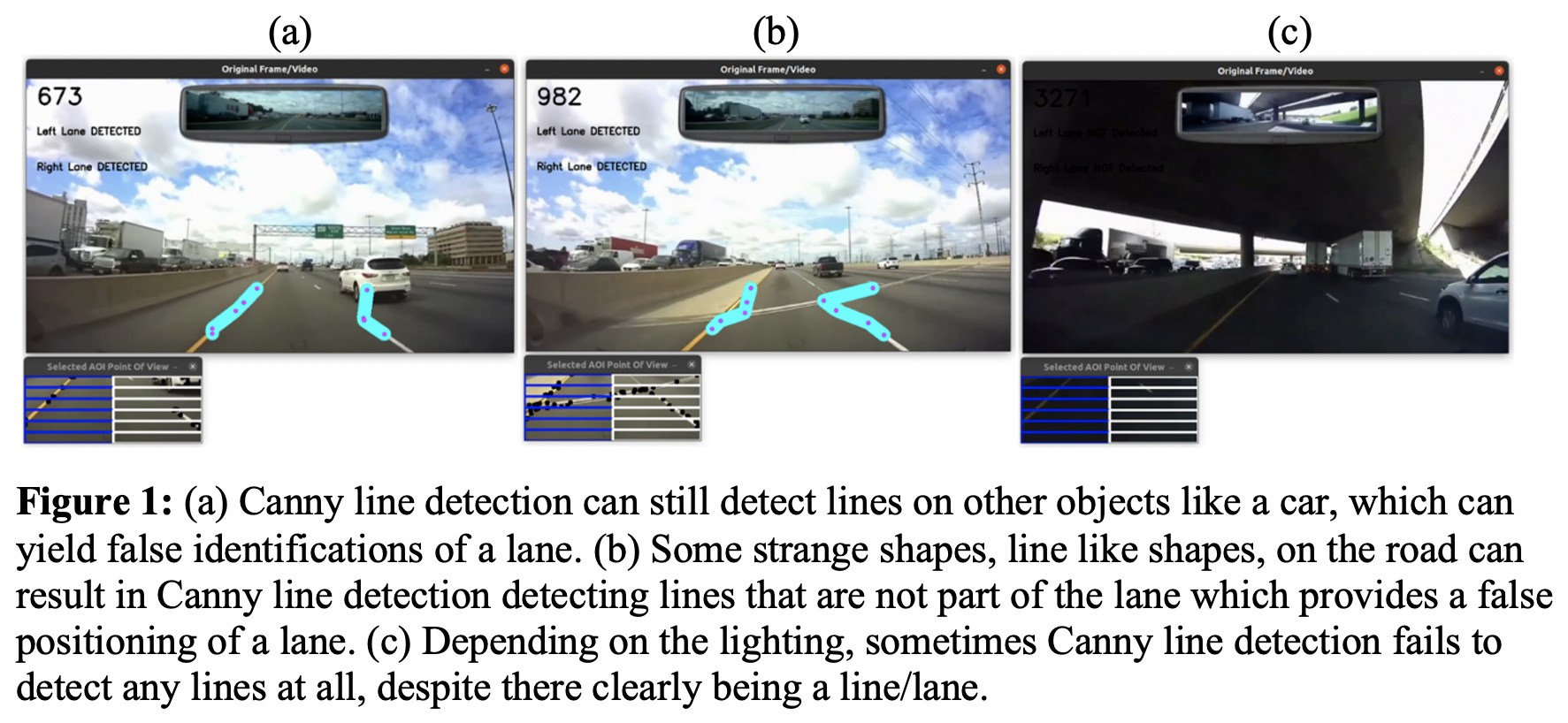
SLD MÜKEMMEL DEĞİL!
SLD Demo’su

Tüm Kaynaklar
Araştırma Makaleleri
- Yapısal otoyol için bilgisayarlı görü algoritmasına dayalı gelişmiş şerit algılama tekniği
- Gerçek Zamanlı Şerit Algılama ve Hareket Planlaması Raspberry Pi ve Arduino ile Otonom Araç Prototipi için
- Genişletilmiş Kenar Bağlama Algoritmasına Dayalı Gerçek Zamanlı Şerit Ayrılma Algılama
Sürüş Klipleri
- Birçok klip youtube-dl ve iMovie kullanılarak düzenlendi
- Tam Otonom Araç Veri Seti
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Diğer Kaynaklar
- OpenCV Canny Kenar Algılama Dokümanı
- OpenCV Hough Çizgi Dönüşümü Dokümanı
- OpenCV Görüntü Düzleştirme Dokümanı
- StackOverflow Fare Konumu Tıklama Algılama - Tartışma
- Bu projede CSOM’un CSCI437 sınıfından alınan bu fonksiyonlar değiştirildi ve kullanıldı:
get_xy() ; create_named_window()