Simpleng Pagtukoy ng Linya ng Lane

Tungkol Dito
Ang simpleng pagtukoy ng lane (SLD), gaya ng ipinahihiwatig ng pangalan, ay software na gumagawa ng simpleng pagtukoy ng lane. Nagagawa ng SLD ito sa pamamagitan lamang ng paggamit ng mga klasikal na pamamaraan ng computer vision, na binubuo ng: AOI, Thresholding, Canny line detection, HoughLinesP, at point clustering. Sa pamamagitan ng mga pamamaraang ito, nakakamit ang pagtukoy sa kaliwa at kanan na lane(s) ng nagmamanehong sasakyan sa video (pananaw).
Mga Limitasyon
Pinakamahusay lang talaga itong gumagana kung malinis ang data ng video, walang mga bagay/sasakyan sa AOI, at maayos ang kondisyon ng kalsada. Isa pang malaking limitasyon ng SLD ay maaari lamang nitong matukoy ang una sa kaliwa at/o unang sa kanan na lane(s) ng pangunahing sasakyan. Hindi nito matutukoy ang lahat ng lane, na naglilimita sa magagawa ng code para sa kabuuang pananaw ng sasakyan. Narito ang isang diyagram/larawan na nagha-highlight sa mga pangunahing isyu sa SLD:
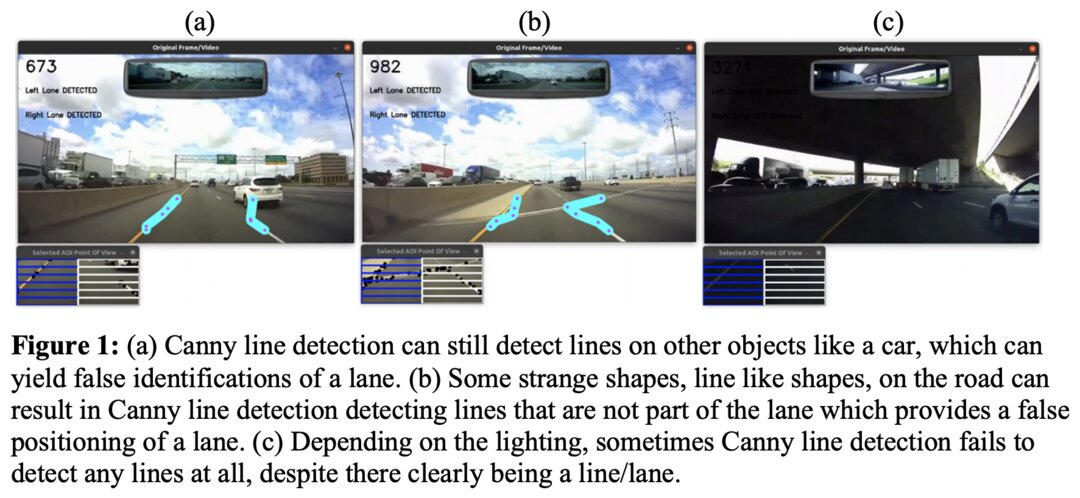
HINDI perpekto ang SLD!
Demo ng SLD
Lahat ng Pinagmulan
Mga Pamanahong Papel sa Pananaliksik
- Advanced lane detection technique for structural highway based on computer vision algorithm
- Real-time Lane detection and Motion Planning in Raspberry Pi and Arduino for an Autonomous Vehicle Prototype
- Real-Time Lane Departure Detection Based on Extended Edge-Linking Algorithm
Mga Klip sa Pagmamaneho
- Maraming klip ang inedit gamit ang youtube-dl at iMovie
- Kumpletong Dataset ng Self Driving Car
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Iba Pang Pinagmulan
- Dokumentasyon ng OpenCV Canny Edge Detection
- Dokumentasyon ng OpenCV Hough Line Transform
- Dokumentasyon ng OpenCV Smoothing Images
- Talakayan sa StackOverflow Detect Mouse Position Click
- Ang mga function na ito mula sa klase ng CSCI437 ng CSOM ay binago at ginamit sa proyektong ito:
get_xy() ; create_named_window()