Simpleng Pagtuklas ng Linya ng Daan
Tungkol
Ang Simple lane detection (SLD), gaya ng ipinahihiwatig ng pangalan, ay isang software na nagsasagawa ng simpleng pagtuklas ng linya ng daan. Naabot ng SLD ito sa pamamagitan ng paggamit lamang ng mga klasikong pamamaraan ng computer vision, na binubuo ng: AOI, thresholding, Canny line detection, HoughLinesP, at point clustering. Gamit ang mga metodong ito, nakukuha ang pagtukoy sa kaliwa at kanang linya ng daan ng sasakyang nagmamaneho sa video (pananaw).
Mga Limitasyon
Talagang pinakamahusay lamang itong gumagana kung malinis ang video data, walang mga bagay/karuho sa AOI, at maayos ang kondisyon ng kalsada. Isa pang malaking limitasyon ng SLD ay maaari lamang nitong matukoy ang unang kaliwa at/o unang kanang linya ng daan ng pangunahing sasakyan. Hindi nito madedetek ang lahat ng mga linya, na nililimitahan kung ano ang maibibigay ng code para sa kabuuang pananaw ng sasakyan. Narito ang isang diagram/larawan na naglalarawan ng mga pangunahing isyu sa SLD:
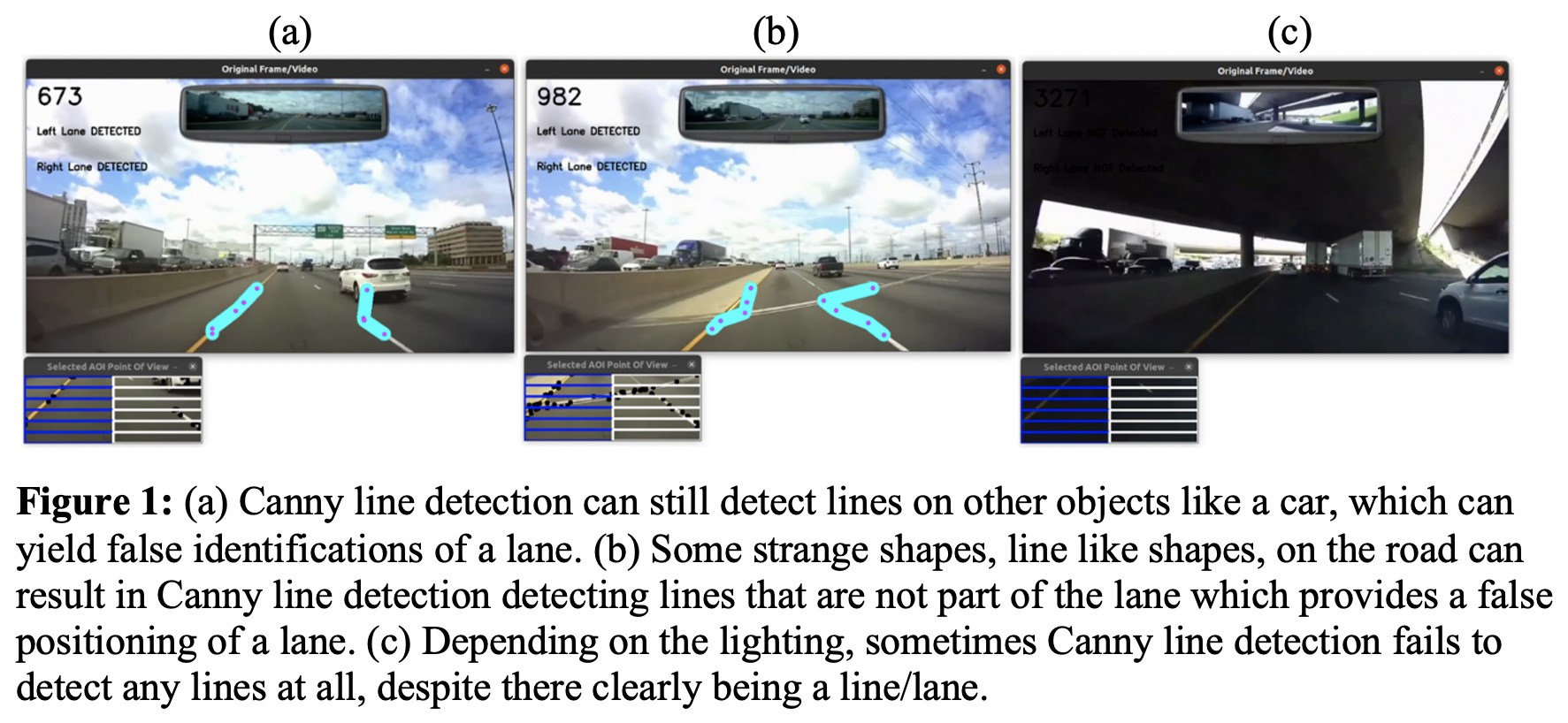
SLD AY HINDI perpekto!
Demo ng SLD

Lahat ng Pinagmulan
Mga Papel na Pananaliksik
- Mas advanced na teknik sa pagtuklas ng linya para sa estruktural na highway na batay sa algorithm ng computer vision
- Real-time na pagtuklas ng linya at Pagpaplano ng Paggalaw sa Raspberry Pi at Arduino para sa isang Prototipo ng Awtonomong Sasakyan
- Real-Time na Pagtuklas ng Pag-alis mula sa Linya Batay sa Pinalawig na Algorithm ng Edge-Linking
Mga Klip ng Pagmamaneho
- Maraming klip ang in-edit gamit ang youtube-dl at iMovie
- Kumpletong Dataset ng Self Driving Car
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Iba Pang Pinagmulan
- Dokumentasyon ng OpenCV para sa Canny Edge Detection
- Dokumentasyon ng OpenCV para sa Hough Line Transform
- Dokumentasyon ng OpenCV sa Pagpapakinis ng Mga Imahe
- Talakayan sa StackOverflow: Pagtuklas ng Posisyon ng Pag-click ng Mouse
- Ang mga sumusunod na function mula sa klase ng CSCI437 ng CSOM ay binago at ginamit sa proyektong ito:
get_xy() ; create_named_window()