Ufuatiliaji Rahisi wa Njia

Kuhusu
Ufuatiliaji rahisi wa njia (SLD) ni, kama jina linavyopendekeza, programu ambayo hufanya ufuatiliaji rahisi wa njia. SLD hufanikisha hili kwa kutumia tu mbinu za kawaida za maono ya kompyuta, zinazojumuisha: AOI, Uwekaji wa kizingiti, utambuzi wa mstari wa Canny, HoughLinesP, na upangaji wa vikundi vya nukta. Kwa kutumia mbinu hizi, utambuzi wa njia za kushoto na kulia za gari linaloendesha kwenye video (mtazamo) unafanikishwa.
Vikwazo
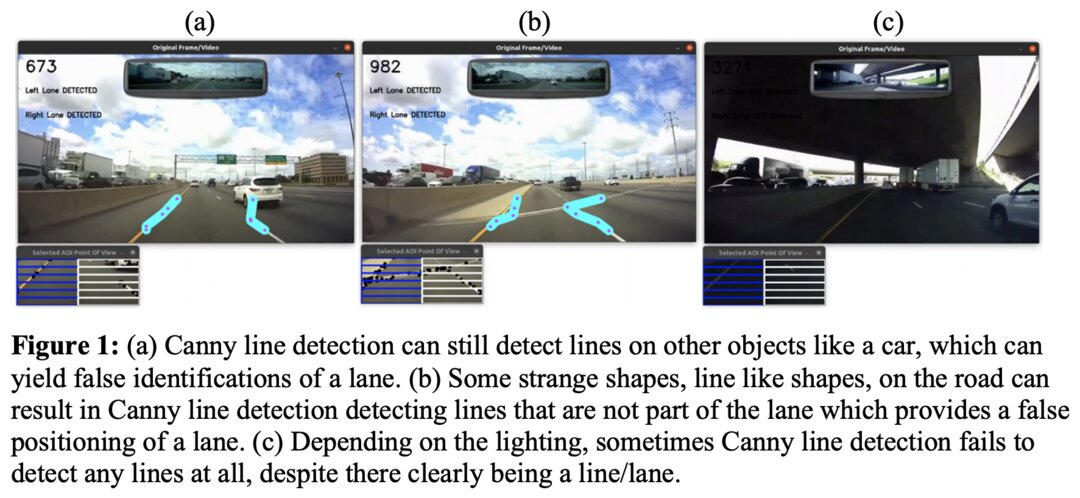
Kwa kweli hufanya kazi vizuri zaidi tu ikiwa data ya video ni safi, hakuna vitu/gari ndani ya AOI, na barabara iko katika hali nzuri kiasi. Kikwazo kingine kikubwa cha SLD ni kwamba inaweza tu kutambua njia ya kwanza ya kushoto na/au ya kwanza ya kulia ya gari kuu. Haitaweza kutambua njia zote, jambo ambalo hupunguza kile msimbo unaweza kutoa kwa mtazamo wa jumla wa gari. Hapa kuna mchoro/takwimu unaoangazia matatizo makuu ya SLD:
SLD SI kamili!
Onyesho la SLD
Vyanzo Vyote
Karatasi za Utafiti
- Mbinu ya hali ya juu ya utambuzi wa njia kwa barabara kuu za kimuundo kwa msingi wa algoriti ya maono ya kompyuta
- Utambuzi wa Njia kwa Wakati Halisi na Upangaji wa Mwendo katika Raspberry Pi na Arduino kwa Kiolezo cha Gari Huru
- Utambuzi wa Kuondoka Njia kwa Wakati Halisi Kulingana na Algoriti Iliyoendelezwa ya Kuunganisha Kingo
Klipu za Kuendesha
- Klipu nyingi zilihaririwa kwa kutumia youtube-dl na iMovie
- Seti Kamili ya Data ya Gari Linalojiendesha lenyewe
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Vyanzo Vingine
- Hati ya Utekelezaji wa Ufuatiliaji wa Kingo wa Canny ya OpenCV
- Hati ya Ubadilishaji wa Mstari wa Hough ya OpenCV
- Hati ya Kulainisha Picha za OpenCV
- Majadiliano ya StackOverflow Tambua Bofya la Nafasi ya Kipanya
- Kazi hizi kutoka darasa la CSCI437 la CSOM zilifanyiwa marekebisho na zikatumiwa katika mradi huu:
get_xy() ; create_named_window()