Простое обнаружение полос
О проекте
Простое обнаружение полос (SLD) — это, как следует из названия, программное обеспечение, которое выполняет простое обнаружение полос. SLD достигает этого, используя только классические методы компьютерного зрения, состоящие из: AOI, пороговой обработки, обнаружения линий Канни, HoughLinesP и кластеризации точек. С помощью этих методов достигается обнаружение левой и правой полосы(полос) автомобиля в видео (точка зрения).
Ограничения
На самом деле, оно работает лучше всего, если данные видео чистые, в AOI нет объектов/автомобилей, и дорога в нормальном состоянии. Еще одно большое ограничение SLD заключается в том, что оно может обнаруживать только первую левую и/или первую правую полосу основного транспортного средства. Оно не будет обнаруживать все полосы, что ограничивает то, что код может предоставить для общей точки зрения автомобиля. Вот диаграмма/иллюстрация, которая подчеркивает основные проблемы с SLD:
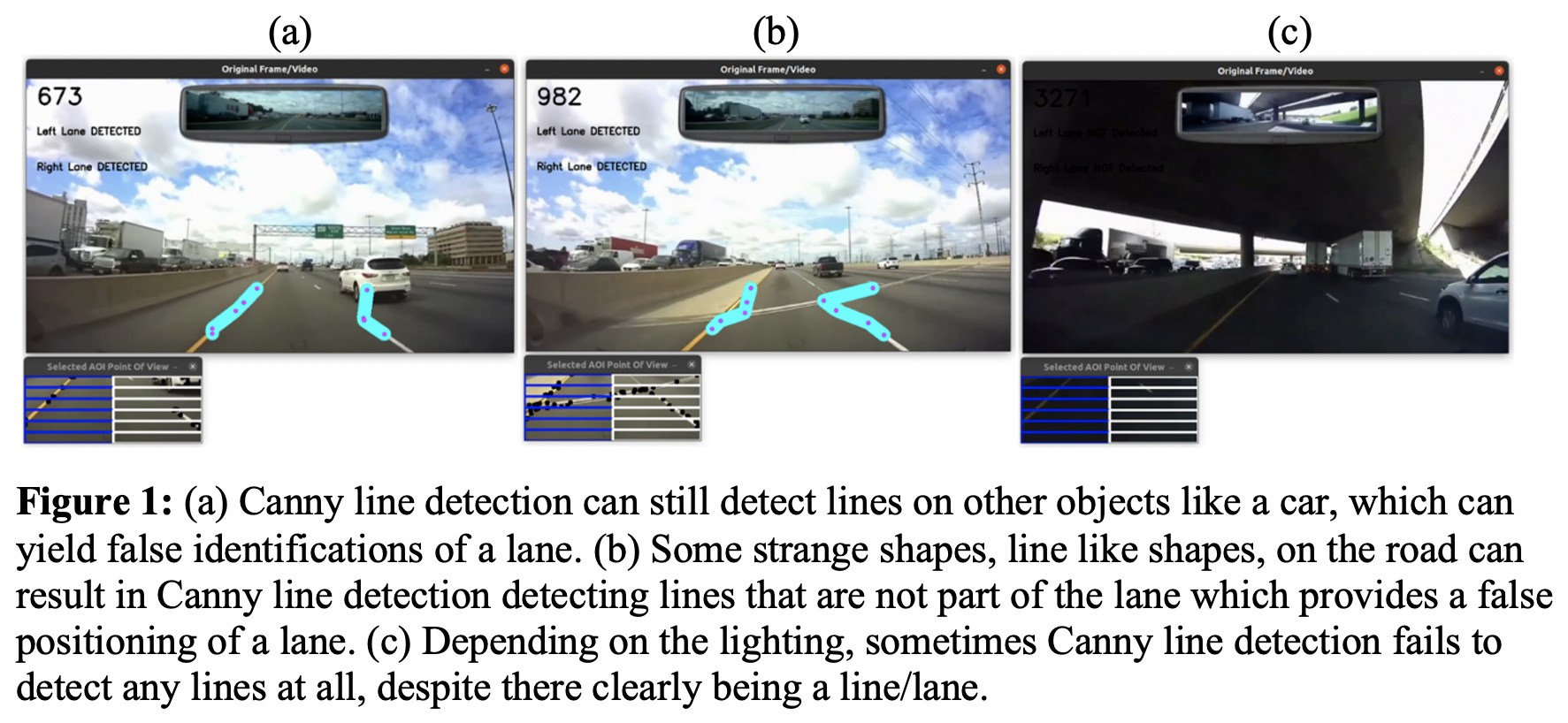
SLD НЕ идеален!
Демонстрация SLD

Все источники
Научные статьи
- Современная техника обнаружения полос для структурных автомагистралей на основе алгоритма компьютерного зрения
- Обнаружение полос в реальном времени и планирование движения на Raspberry Pi и Arduino для прототипа автономного транспортного средства
- Обнаружение выезда с полосы в реальном времени на основе расширенного алгоритма связывания краев
Видеоклипы вождения
- Многие клипы были отредактированы с использованием youtube-dl и iMovie
- Полный набор данных для самоуправляемого автомобиля
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Другие источники
- Документация OpenCV по обнаружению краев Канни
- Документация OpenCV по преобразованию линий Хафа
- Документация OpenCV по сглаживанию изображений
- Обсуждение на StackOverflow о определении позиции мыши при клике
- Эти функции из класса CSCI437 CSOM были изменены и использованы в этом проекте:
get_xy() ; create_named_window()