ਸਧਾਰਨ ਲੇਨ ਪਹਿਚਾਣ

ਬਾਰੇ
ਸਧਾਰਨ ਲੇਨ ਪਹਿਚਾਣ (SLD), ਜਿਵੇਂ ਨਾਮ ਤੋਂ ਹੀ ਪਤਾ ਲੱਗਦਾ ਹੈ, ਉਹ ਸੌਫਟਵੇਅਰ ਹੈ ਜੋ ਸਧਾਰਨ ਲੇਨ ਪਹਿਚਾਣ ਕਰਦਾ ਹੈ। SLD ਇਹ ਕੰਮ ਸਿਰਫ਼ ਪਰੰਪਰਾਗਤ ਕੰਪਿਊਟਰ ਵਿਜ਼ਨ ਵਿਧੀਆਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਕਰਦਾ ਹੈ, ਜਿਨ੍ਹਾਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ: AOI, ਥ੍ਰੈਸ਼ਹੋਲਡਿੰਗ, ਕੈਨੀ ਲਾਈਨ ਪਹਿਚਾਣ, HoughLinesP, ਅਤੇ ਬਿੰਦੂ ਕਲੱਸਟਰਿੰਗ। ਇਨ੍ਹਾਂ ਵਿਧੀਆਂ ਦੀ ਵਰਤੋਂ ਨਾਲ ਵੀਡੀਓ ਵਿੱਚ ਡਰਾਈਵ ਕਰ ਰਹੀ ਕਾਰ ਦੀ ਖੱਬੀ ਅਤੇ ਸੱਜੀ ਲੇਨ(ਾਂ) ਦੀ ਪਹਿਚਾਣ (ਦ੍ਰਿਸ਼ਟੀਕੋਣ) ਪ੍ਰਾਪਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਸੀਮਾਵਾਂ
ਇਹ ਵਾਸਤਵ ਵਿੱਚ ਸਭ ਤੋਂ ਵਧੀਆ ਤਦ ਹੀ ਕੰਮ ਕਰਦਾ ਹੈ ਜੇ ਵੀਡੀਓ ਡਾਟਾ ਸਾਫ਼ ਹੋਵੇ, AOI ਵਿੱਚ ਕੋਈ ਵਸਤੂਆਂ/ਕਾਰਾਂ ਨਾ ਹੋਣ, ਅਤੇ ਸੜਕ ਦੀ ਹਾਲਤ ਠੀਕ ਹੋਵੇ। SLD ਦੀ ਇੱਕ ਹੋਰ ਵੱਡੀ ਸੀਮਾ ਇਹ ਹੈ ਕਿ ਇਹ ਮੁੱਖ ਵਾਹਨ ਦੀ ਸਿਰਫ਼ ਪਹਿਲੀ ਖੱਬੀ ਅਤੇ/ਜਾਂ ਪਹਿਲੀ ਸੱਜੀ ਲੇਨ(ਾਂ) ਦੀ ਹੀ ਪਹਿਚਾਣ ਕਰ ਸਕਦਾ ਹੈ। ਇਹ ਸਾਰੀਆਂ ਲੇਨਾਂ ਦੀ ਪਹਿਚਾਣ ਨਹੀਂ ਕਰੇਗਾ, ਜਿਸ ਨਾਲ ਕੋਡ ਕਾਰ ਦੇ ਸਮੁੱਚੇ ਦ੍ਰਿਸ਼ਟੀਕੋਣ ਲਈ ਕੀ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦਾ ਹੈ, ਉਹ ਸੀਮਿਤ ਹੋ ਜਾਂਦਾ ਹੈ। ਇੱਥੇ ਇੱਕ ਚਿੱਤਰ/ਆਕ੍ਰਿਤੀ ਹੈ ਜੋ SLD ਨਾਲ ਸੰਬੰਧਿਤ ਮੁੱਖ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਉਜਾਗਰ ਕਰਦੀ ਹੈ:
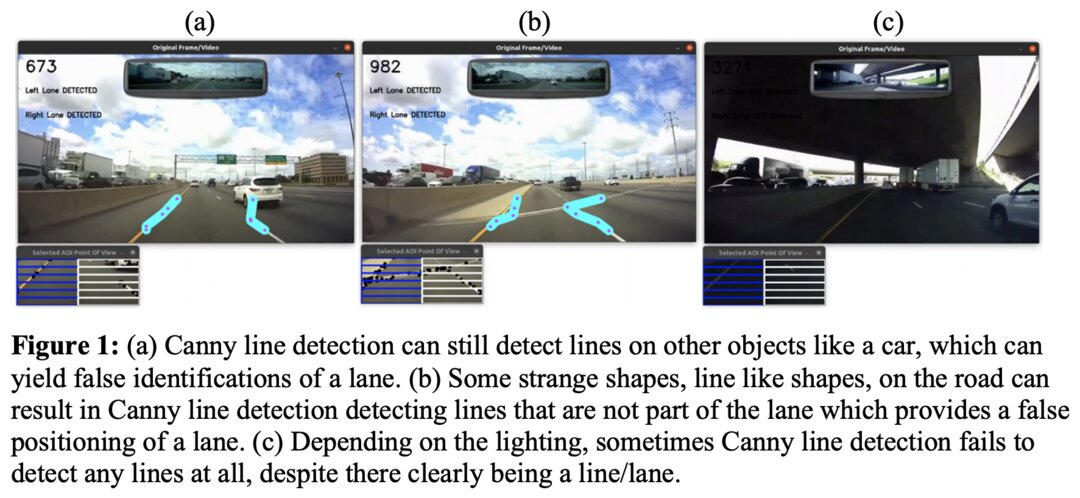
SLD ਪੂਰਨ ਨਹੀਂ ਹੈ!
SLD ਦਾ ਡੈਮੋ
ਸਾਰੇ ਸਰੋਤ
ਖੋਜ ਪੱਤਰ
- ਕੰਪਿਊਟਰ ਵਿਜ਼ਨ ਐਲਗੋਰਿਥਮ ਦੇ ਆਧਾਰ ‘ਤੇ ਸੰਰਚਨਾਤਮਕ ਹਾਈਵੇ ਲਈ ਉੱਨਤ ਲੇਨ ਪਹਿਚਾਣ ਤਕਨੀਕ
- ਇੱਕ ਸਵਾਇਤ ਵਾਹਨ ਪ੍ਰੋਟੋਟਾਈਪ ਲਈ ਰਾਸਪਬੇਰੀ ਪਾਈ ਅਤੇ ਅਰਡੂਇਨੋ ਵਿੱਚ ਰੀਅਲ-ਟਾਈਮ ਲੇਨ ਪਹਿਚਾਣ ਅਤੇ ਗਤੀ ਯੋਜਨਾ
- ਵਧੇਰੇ ਐਜ-ਲਿੰਕਿੰਗ ਐਲਗੋਰਿਥਮ ‘ਤੇ ਆਧਾਰਿਤ ਰੀਅਲ-ਟਾਈਮ ਲੇਨ ਰਵਾਨਗੀ ਪਹਿਚਾਣ
ਡ੍ਰਾਈਵਿੰਗ ਕਲਿੱਪਸ
- youtube-dl ਅਤੇ iMovie ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਬਹੁਤ ਸਾਰੀਆਂ ਕਲਿੱਪਸ ਸੰਪਾਦਿਤ ਕੀਤੀਆਂ ਗਈਆਂ ਸਨ
- ਸਵੈ-ਚਾਲਿਤ ਕਾਰ ਪੂਰਾ ਡਾਟਾਸੈੱਟ
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
ਹੋਰ ਸਰੋਤ
- OpenCV Canny Edge Detection ਦਸਤਾਵੇਜ਼
- OpenCV Hough Line Transform ਦਸਤਾਵੇਜ਼
- OpenCV Smoothing Images ਦਸਤਾਵੇਜ਼
- StackOverflow Detect Mouse Position Click - ਚਰਚਾ
- CSOM ਦੀ CSCI437 ਕਲਾਸ ਤੋਂ ਇਹ ਫੰਕਸ਼ਨ ਸੋਧੇ ਗਏ ਅਤੇ ਇਸ ਪ੍ਰੋਜੈਕਟ ਵਿੱਚ ਵਰਤੇ ਗਏ:
get_xy() ; create_named_window()