ਸਧਾਰਨ ਲੇਨ ਪਛਾਣ
ਬਾਰੇ
ਸਧਾਰਨ ਲੇਨ ਪਛਾਣ (SLD) ਨਾਮ ਵਾਂਗੋਂ, ਇਹ ਉਹ ਸੌਫਟਵੇਅਰ ਹੈ ਜੋ ਸਧਾਰਨ ਲੇਨਾਂ ਦੀ ਪਛਾਣ ਕਰਦਾ ਹੈ। SLD ਇਹ ਸਿਰਫ਼ ਪਾਰੰਪਰਿਕ ਕੰਪਿਊਟਰ ਵਿਜ਼ਨ ਤਰੀਕਿਆਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਹਾਸਲ ਕਰਦਾ ਹੈ, ਜੋ ਇਹਨਾਂ ਤੱਤਾਂ ਤੋਂ ਬਣਦਾ ਹੈ: AOI, Thresholding, Canny line detection, HoughLinesP, & point clustering। ਇਨ੍ਹਾਂ ਤਰੀਕਿਆਂ ਦੀ ਵਰਤੋਂ ਨਾਲ, ਵੀਡੀਓ (ਨਜ਼ਰੀਏ) ਵਿੱਚ ਚਲ ਰਹੀ ਗੱਡੀ ਦੀ ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਲੇਨ(ਾਂ) ਦੀ ਪਛਾਣ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਸੀਮਾਵਾਂ
ਇਹ ਵਧੀਆ ਤਰ੍ਹਾਂ ਸਿਰਫ਼ ਉਸ ਵੇਲੇ ਕੰਮ ਕਰਦਾ ਹੈ ਜਦੋਂ ਵੀਡੀਓ ਡੇਟਾ ਸਾਫ਼ ਹੋਵੇ, AOI ਵਿੱਚ ਕੋਈ ਵਸਤੂ/ਗੱਡੀਆਂ ਨ ਹੋਣ, ਅਤੇ ਸੜਕ ਦੀ ਹਾਲਤ ਠੀਕ ਹੋਵੇ। SLD ਦੀ ਇੱਕ ਹੋਰ ਵੱਡੀ ਸੀਮਾ ਇਹ ਹੈ ਕਿ ਇਹ ਸਿਰਫ਼ ਮੁੱਖ ਵਾਹਨ ਦੀ ਪਹਿਲੀ ਖੱਬੀ ਅਤੇ/ਜਾਂ ਪਹਿਲੀ ਸੱਜੀ ਲੇਨ(ਾਂ) ਨੂੰ ਹੀ ਪਛਾਣ ਸਕਦਾ/ਸਕਦੀ ਹੈ। ਇਹ ਸਾਰੀਆਂ ਲੇਨਾਂ ਨੂੰ ਪਛਾਣੇਗਾ/ਪਛਾਣੇਗੀ ਨਹੀਂ, ਜਿਸ ਨਾਲ ਕੋਡ ਵੱਲੋਂ ਵਾਹਨ ਦੇ ਸਮੁੱਚੇ ਨਜ਼ਰੀਏ ਲਈ ਜੋ ਜਾਣਕਾਰੀ ਦਿੱਤੀ ਜਾ ਸਕਦੀ ਹੈ ਉਹ ਸੀਮਿਤ ਹੈ। ਹੇਠਾਂ ਇੱਕ ਚਿੱਤਰ/ਫ਼ਿਗਰ ਹੈ ਜੋ SLD ਨਾਲ ਸੰਬੰਧਤ ਮੁੱਖ ਮੁੱਦੇ ਹਾਈਲਾਈਟ ਕਰਦਾ ਹੈ:
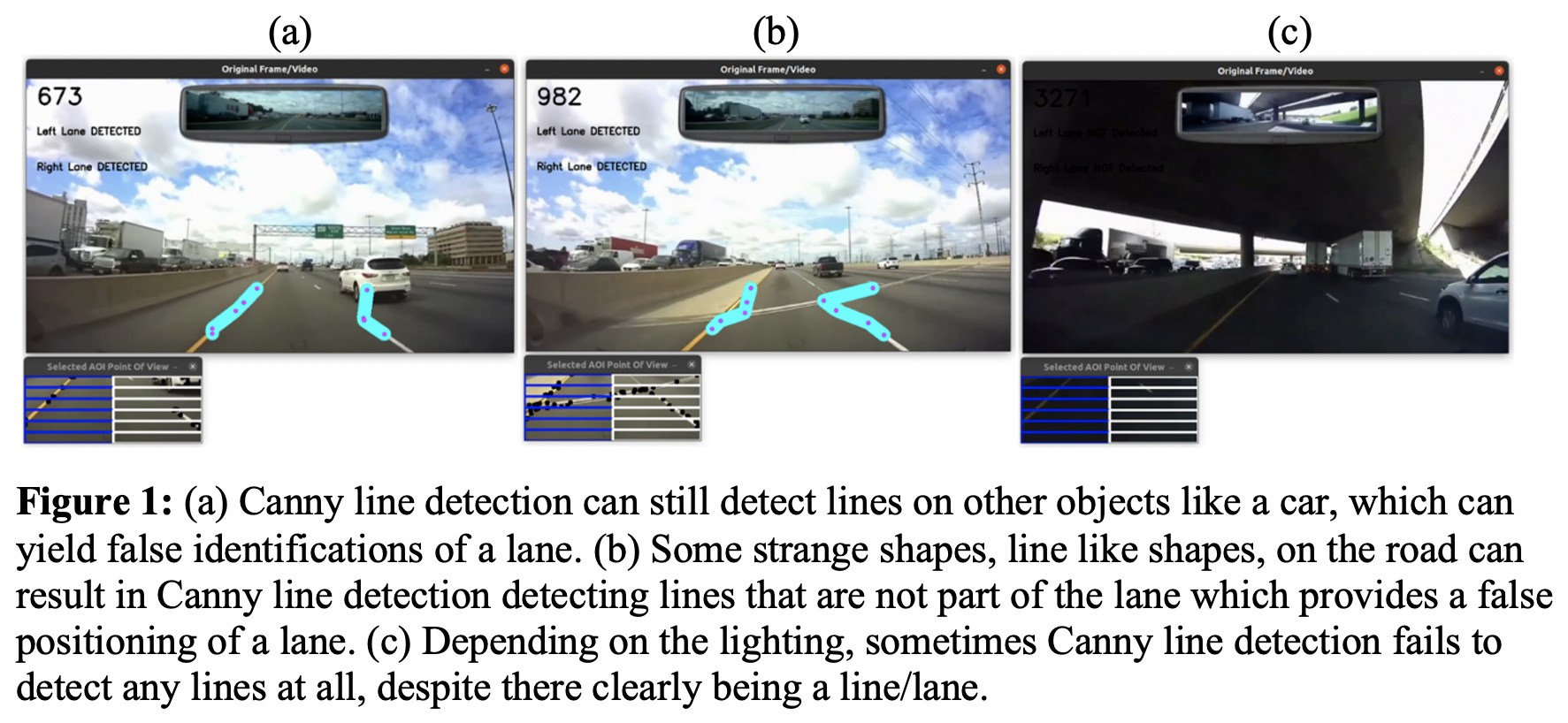
SLD ਪੂਰਨ ਨਹੀਂ ਹੈ!
SLD ਦਾ ਡੈਮੋ

ਸਾਰੇ ਸਰੋਤ
ਸ਼ੋਧ ਪੇਪਰ
- ਕੰਪਿਊਟਰ ਵਿਜ਼ਨ ਅਲਗੋਰਿਦਮ ਆਧਾਰਿਤ ਸਟ੍ਰਕਚਰਲ ਹਾਈਵੇ ਲਈ ਉੱਨਤ ਲੇਨ ਪਛਾਣ ਤਕਨੀਕ
- ਰਾਸਬੇਰੀ ਪਾਈ ਅਤੇ ਅਰਡੂਇਨੋ ਵਿੱਚ ਰੀਅਲ-ਟਾਈਮ ਲੇਨ ਪਛਾਣ ਅਤੇ ਮੋਸ਼ਨ ਯੋਜਨਾ ਲਈ ਸਵੈ-ਚਾਲਕ ਵਾਹਨ ਪ੍ਰੋਟੋਟਾਇਪ
- ਵਧੇਰੇ ਏਜ-ਲਿੰਕੀੰਗ ਅਲਗੋਰਿਦਮ ਅਧਾਰਿਤ ਰੀਅਲ-ਟਾਈਮ ਲੇਨ ਡਿਪਾਰਚਰ ਪਛਾਣ
ਡ੍ਰਾਈਵਿੰਗ ਕਲਿੱਪਸ
- ਕਈ ਕਲਿੱਪਸ youtube-dl ਅਤੇ iMovie ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਸੋਧੇ ਗਏ ਸਨ
- ਸੈਲਫ ਡਰਾਈਵਿੰਗ ਕਾਰ ਪੂਰਾ ਡੇਟਾਸੈਟ
- ਕੈਲ_ਫ੍ਰੀਵੇ
- ਦੇਲਿਹੀ_ਡ੍ਰਾਈਵ
- ਮਾਊਟ_ਡ੍ਰਾਈਵ
- ਮਿਸੀ_ਡ੍ਰਾਈਵ
- ਟਰੋਂਟੋ_ਵੇ
- ਟਰੋਂਟੋ_ਲੰਬਾ
- ਸੀਅਟਲ_ਸੜਕਾਂ
ਹੋਰ ਸਰੋਤ
- OpenCV Canny ਐਜ ਡਿਟੈਕਸ਼ਨ ਦਸਤਾਵੇਜ਼
- OpenCV Hough ਲਾਈਨ ਟਰਾਂਸਫਾਰਮ ਦਸਤਾਵੇਜ਼
- OpenCV Smoothing Images ਦਸਤਾਵੇਜ਼
- StackOverflow ਮਾਊਸ ਸਥਿਤੀ ਕਲਿਕ ਪਛਾਣ - ਚਰਚਾ
- ਇਨ੍ਹਾਂ ਫੰਕਸ਼ਨਾਂ ਨੂੰ CSOM ਦੀ CSCI437 ਕਲਾਸ ਤੋਂ ਸੋਧਿਆ ਅਤੇ ਇਸ ਪ੍ਰੋਜੈਕਟ ਵਿੱਚ ਵਰਤਿਆ ਗਿਆ:
get_xy() ; create_named_window()