단순 차선 감지

소개
단순 차선 감지(SLD)는 이름에서 알 수 있듯이 단순한 차선 감지를 수행하는 소프트웨어입니다. SLD는 AOI, 임계값 처리, Canny 선 감지, HoughLinesP, 그리고 점 클러스터링으로 구성된 고전적인 컴퓨터 비전 방법만을 사용하여 이를 달성합니다. 이러한 방법을 사용해 영상의 자동차 주행 시점(시야)에서 좌측 및 우측 차선을 감지합니다.
한계
이것은 영상 데이터가 깨끗하고, AOI 내에 물체/차량이 없으며, 도로 상태가 괜찮을 때에만 실제로 가장 잘 작동합니다. SLD의 또 다른 큰 한계는 주 차량의 첫 번째 왼쪽 및/또는 첫 번째 오른쪽 차선만 감지할 수 있다는 점입니다. 모든 차선을 감지하지는 못하므로, 코드가 자동차의 전체 시점에 대해 제공할 수 있는 정보가 제한됩니다. 다음은 SLD의 주요 문제를 강조하는 다이어그램/그림입니다:
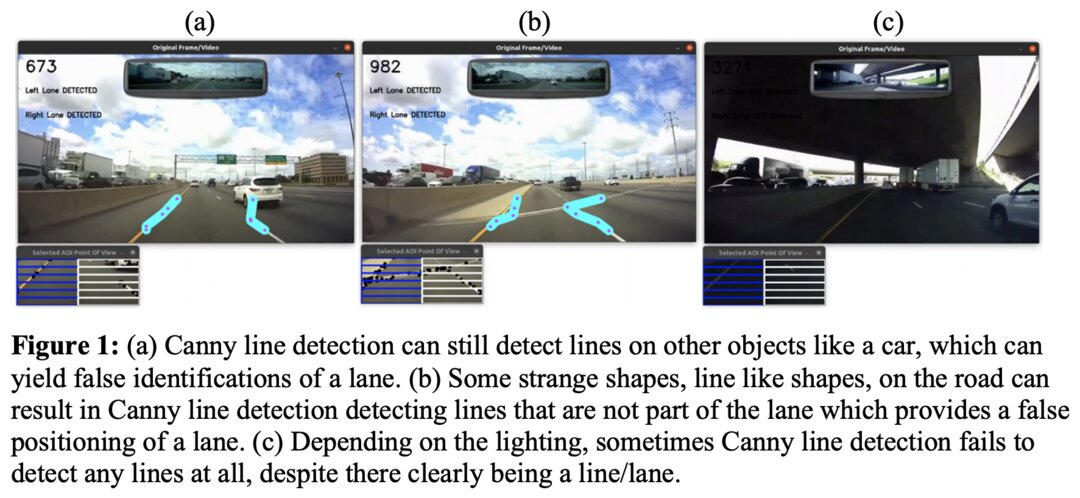
SLD는 완벽하지 않습니다!
SLD 데모
모든 출처
연구 논문
- 컴퓨터 비전 알고리즘 기반 구조화된 고속도로를 위한 고급 차선 감지 기법
- 자율주행 차량 프로토타입을 위한 라즈베리 파이와 아두이노에서의 실시간 차선 감지 및 운동 계획
- 확장 엣지 연결 알고리즘 기반 실시간 차선 이탈 감지
주행 클립
- [많은 클립은 youtube-dl과 iMovie를 사용해 편집되었습니다]
- 자율주행차 전체 데이터셋
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
기타 출처
- OpenCV Canny 에지 검출 문서
- OpenCV 허프 선 변환 문서
- OpenCV 이미지 스무딩 문서
- StackOverflow 마우스 위치 클릭 감지 - 토론
- CSOM의 CSCI437 수업의 다음 함수들은 수정되어 이 프로젝트에 사용되었습니다:
get_xy() ; create_named_window()