シンプルな車線検出

概要
シンプル車線検出(SLD)は、その名のとおり、単純な車線検出を行うソフトウェアです。SLDは、AOI、しきい値処理、Canny線検出、HoughLinesP、および点クラスタリングから成る従来のコンピュータビジョン手法を使うだけでこれを実現します。これらの手法を用いることで、動画内の運転車両の左および右の車線(群)を検出することができます(視点)。
制限
本当に最もよく動作するのは、動画データがきれいで、AOI内に物体や車がなく、道路の状態がまあまあ良好な場合だけです。SLDのもう一つの大きな制限は、主車両の最初の左車線および/または最初の右車線(群)しか検出できないことです。すべての車線を検出するわけではないため、車の全体的な視点に対してコードが提供できる内容は制限されます。以下は、SLDの主な問題点を強調した図/イラストです。
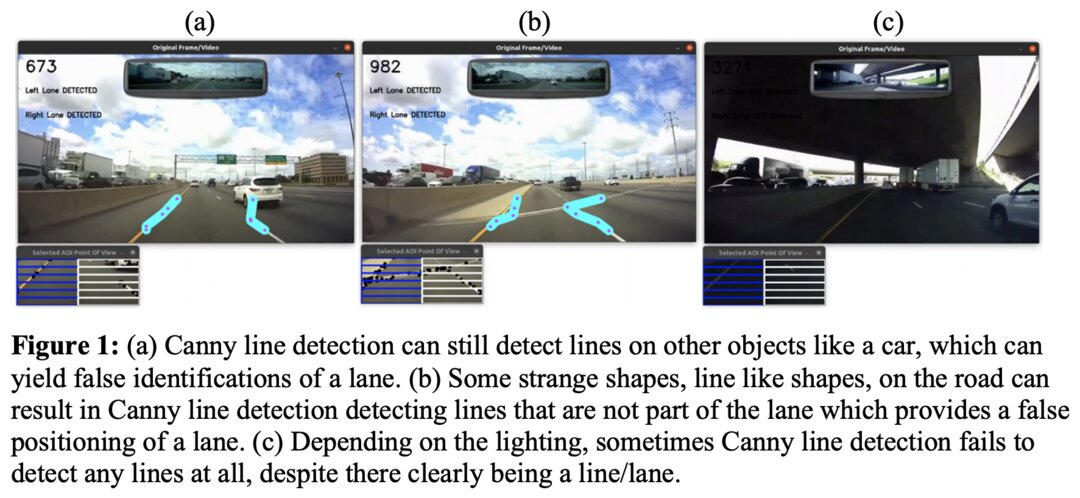
SLDは完璧ではありません!
SLDのデモ
すべてのソース
研究論文
- コンピュータビジョンアルゴリズムに基づく構造化高速道路のための高度な車線検出技術
- 自律走行車プロトタイプのためのRaspberry PiとArduinoにおけるリアルタイム車線検出と動作計画
- 拡張エッジリンクアルゴリズムに基づくリアルタイム車線逸脱検出
走行クリップ
- youtube-dl と iMovie を使用して多くのクリップが編集されました
- 自動運転車完全データセット
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
その他のソース
- OpenCV Cannyエッジ検出ドキュメント
- OpenCV Hough直線変換ドキュメント
- OpenCV画像平滑化ドキュメント
- StackOverflow マウス位置のクリック検出 - 議論
- このプロジェクトでは、CSOMのCSCI437クラスの以下の関数が修正され、使用されました:
get_xy() ; create_named_window()