シンプルなレーン検出
概要
シンプルレーン検出(SLD)は、その名の通り、シンプルなレーン検出を行うソフトウェアです。SLDは、古典的なコンピュータビジョン手法のみを使用して、AOI、しきい値処理、Cannyエッジ検出、HoughLinesP、ポイントクラスタリングで構成されています。これらの手法を使用して、ビデオ(視点)内の走行車の左側および右側のレーン(複数可)の検出が実現されます。
制限事項
この手法は、ビデオデータがクリーンで、AOI内に物体や車がなく、道路が良好な状態である場合に最も効果的に機能します。SLDのもう一つの大きな制限は、メイン車両の最初の左レーンおよび/または最初の右レーン(複数可)しか検出できないことです。すべてのレーンを検出することはできず、コードが車の全体的な視点に提供できる情報が制限されます。以下は、SLDの主な問題点を強調した図です:
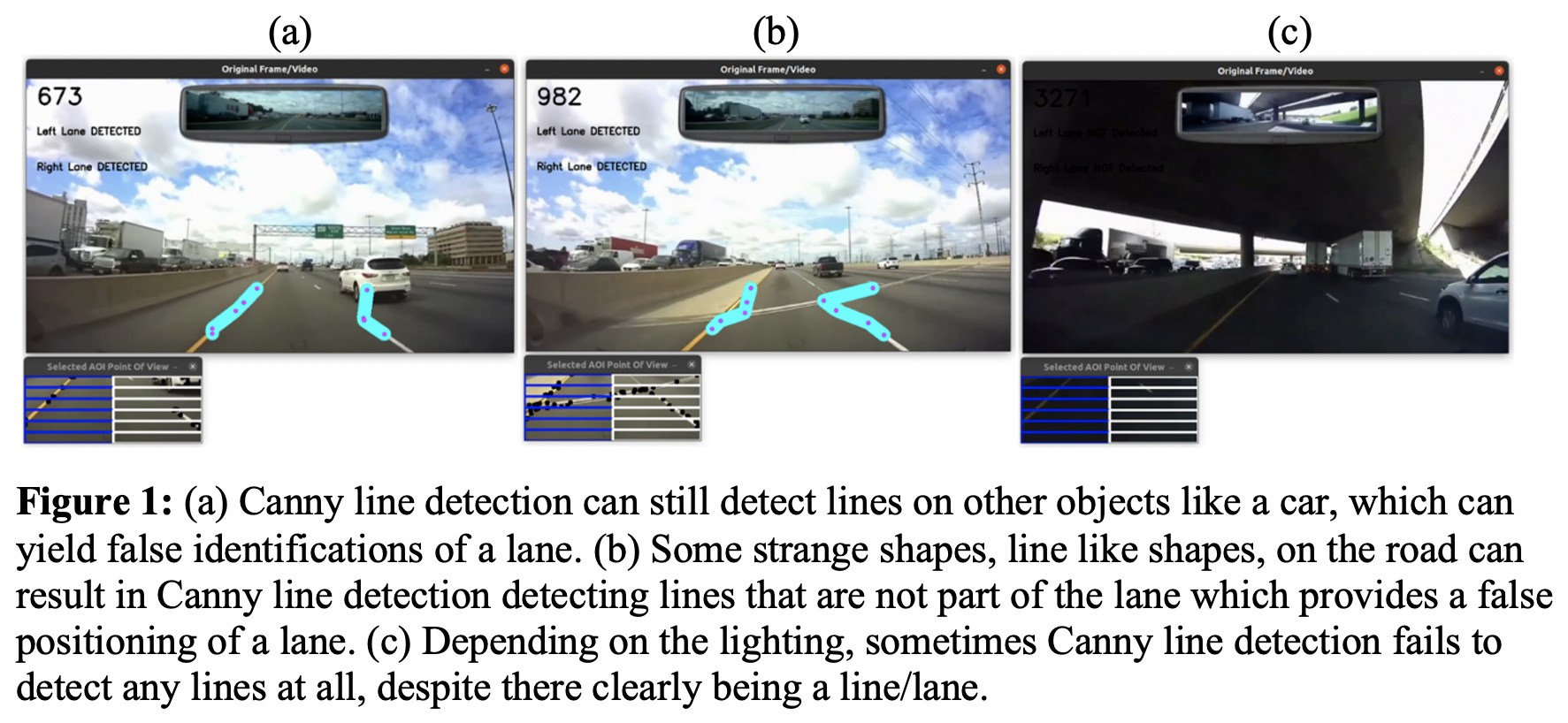
SLDは完璧ではありません!
SLDのデモ

すべてのソース
研究論文
- コンピュータビジョンアルゴリズムに基づく構造的高速道路の高度なレーン検出技術
- 自律走行車プロトタイプのためのRaspberry PiとArduinoにおけるリアルタイムレーン検出とモーションプランニング
- 拡張エッジリンクアルゴリズムに基づくリアルタイムレーン逸脱検出
ドライビングクリップ
- 多くのクリップはyoutube-dlとiMovieを使用して編集されました
- 自動運転車完全データセット
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
その他のソース
- OpenCV Cannyエッジ検出ドキュメント
- OpenCV Houghライン変換ドキュメント
- OpenCV 画像平滑化ドキュメント
- StackOverflow マウス位置クリック検出 - ディスカッション
- CSOMのCSCI437クラスのこれらの関数は修正され、このプロジェクトで使用されました:
get_xy() ; create_named_window()