Rilevamento semplice delle corsie
Repository GitHub del progetto
Informazioni
Simple lane detection (SLD) è, come suggerisce il nome, è un software che esegue un semplice rilevamento delle corsie. SLD ottiene questo usando solo metodi classici di visione artificiale, costituiti da: AOI, Thresholding, Canny line detection, HoughLinesP, & point clustering. Utilizzando questi metodi, si ottiene il rilevamento della(e) corsia(e) sinistra e destra del veicolo che guida nel video (punto di vista).
Limitazioni
Funziona davvero al meglio solo se i dati video sono puliti, non ci sono oggetti/auto nell’AOI e la strada è in buone condizioni. Un’altra grande limitazione di SLD è che può rilevare solo la prima corsia sinistra e/o la prima corsia destra del veicolo principale. Non rileverà tutte le corsie, il che limita ciò che il codice può fornire per il punto di vista complessivo dell’auto. Ecco uno schema/figura che evidenzia i principali problemi di SLD:
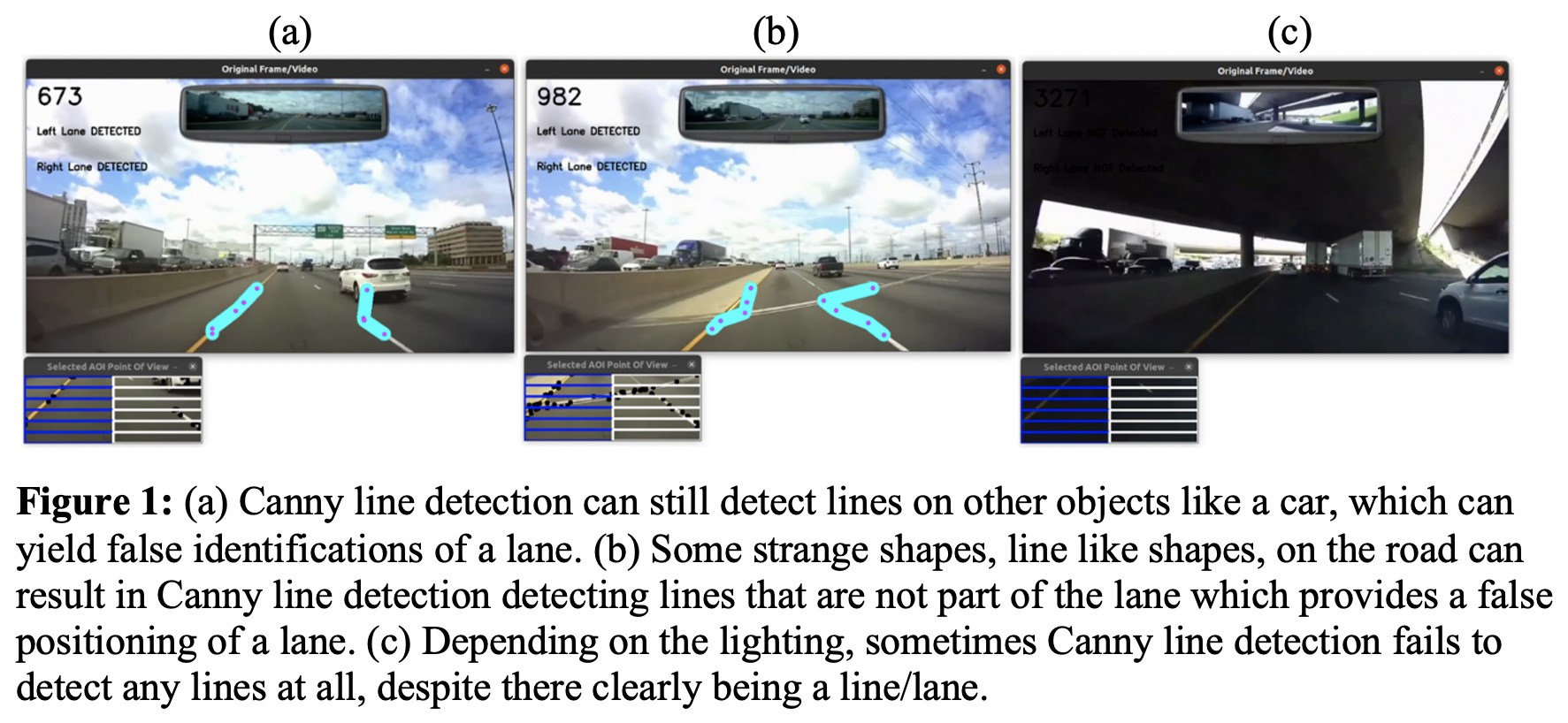
SLD NON è perfetto!
Demo di SLD

Tutte le fonti
Articoli di ricerca
- Tecnica avanzata di rilevamento delle corsie per autostrade strutturali basata su algoritmo di visione artificiale
- Rilevamento delle corsie in tempo reale e pianificazione del movimento su Raspberry Pi e Arduino per un prototipo di veicolo autonomo
- Rilevamento in tempo reale dell’abbandono della corsia basato su un algoritmo esteso di collegamento dei bordi
Clip di guida
- Molti clip sono stati modificati usando youtube-dl e iMovie
- Dataset completo per veicoli a guida autonoma
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Altre fonti
- Documentazione OpenCV - Rilevamento dei bordi Canny
- Documentazione OpenCV - Trasformata di Hough per linee
- Documentazione OpenCV - Smussamento delle immagini
- StackOverflow - Rilevare la posizione del mouse al clic - Discussione
- Queste funzioni della classe CSCI437 di CSOM sono state modificate e usate in questo progetto:
get_xy() ; create_named_window()