Deteksi Jalur Sederhana
Tentang
Simple lane detection (SLD) adalah, seperti namanya, perangkat lunak yang melakukan deteksi jalur sederhana. SLD mencapai ini dengan hanya menggunakan metode penglihatan komputer klasik, yang terdiri dari: AOI, Thresholding, Canny line detection, HoughLinesP, & point clustering. Menggunakan metode-metode ini, pendeteksian jalur kiri dan kanan dari mobil yang sedang mengemudi dalam video (sudut pandang) tercapai.
Keterbatasan
Ini benar-benar hanya bekerja paling baik jika data video bersih, tidak ada objek/mobil di AOI, dan kondisi jalan dalam keadaan cukup baik. Batasan besar lain dari SLD adalah bahwa ia hanya dapat mendeteksi jalur kiri pertama dan/atau jalur kanan pertama dari kendaraan utama. Ia tidak akan mendeteksi semua jalur, yang membatasi apa yang dapat diberikan kode untuk sudut pandang keseluruhan mobil. Berikut adalah diagram/gambar yang menyoroti masalah utama dengan SLD:
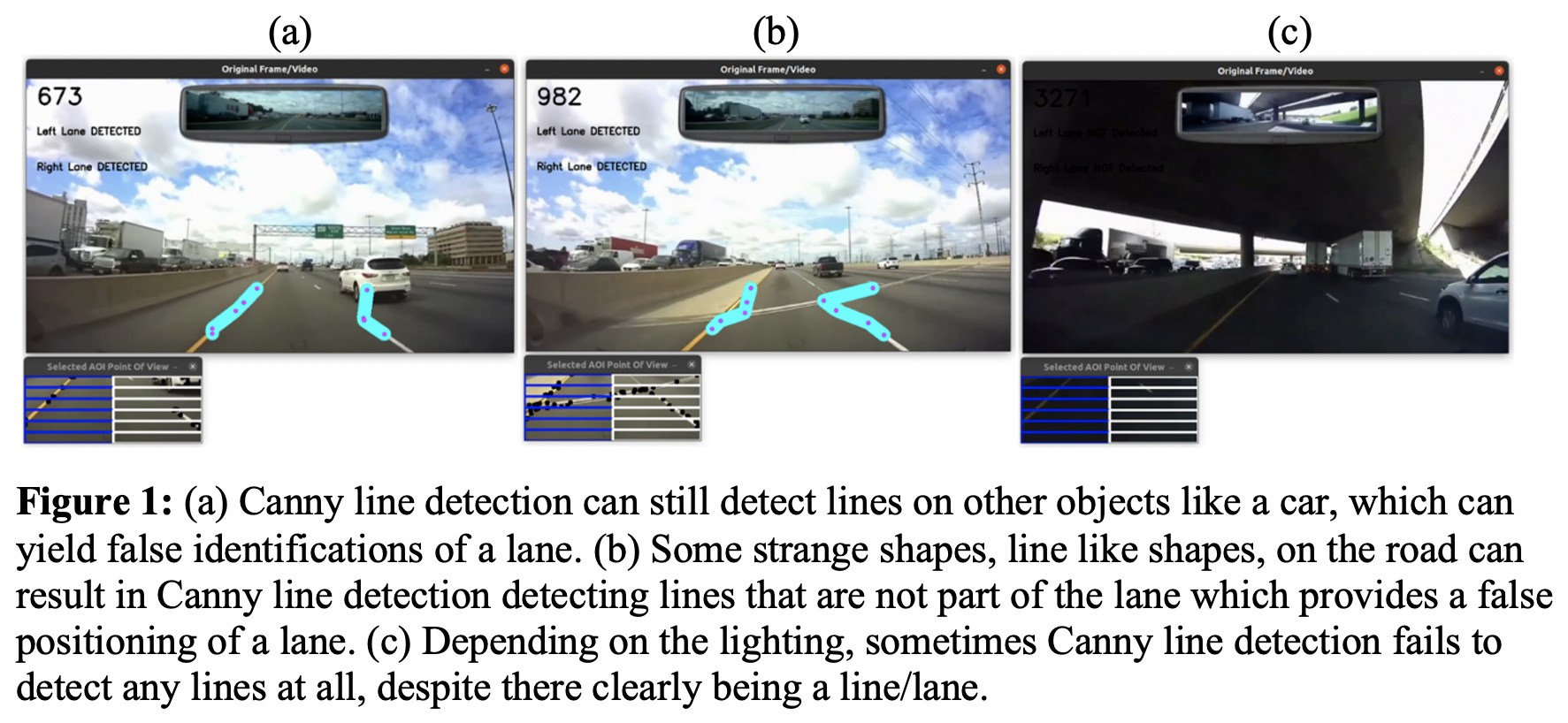
SLD TIDAK sempurna!
Demo Dari SLD

Semua Sumber
Makalah Penelitian
- Teknik deteksi jalur lanjutan untuk jalan raya struktural berdasarkan algoritma penglihatan komputer
- Deteksi Jalur Waktu Nyata dan Perencanaan Gerak di Raspberry Pi dan Arduino untuk Prototipe Kendaraan Otonom
- Deteksi Penyimpangan Jalur Waktu Nyata Berdasarkan Algoritma Extended Edge-Linking
Klip Mengemudi
- Banyak klip diedit menggunakan [youtube-dl] dan [iMovie]
- Dataset Lengkap Mobil Swakemudi
- cal_jalan_bebas_hambatan
- delihi_mengemudi
- mout_mengemudi
- missi_mengemudi
- toronto_jalan
- toronto_lebih_panjang
- seattle_jalanan
Sumber Lainnya
- Dokumentasi OpenCV Deteksi Tepi Canny
- Dokumentasi OpenCV Transformasi Garis Hough
- Dokumentasi OpenCV Penghalusan Gambar
- Diskusi StackOverflow tentang Mendeteksi Posisi Klik Mouse
- Fungsi-fungsi ini dari kelas CSOM CSCI437 dimodifikasi & digunakan dalam proyek ini:
get_xy() ; create_named_window()