सरल लेन पहचान

के बारे में
सरल लेन पहचान (SLD), जैसा कि नाम से संकेत मिलता है, ऐसा सॉफ़्टवेयर है जो सरल लेन पहचान करता है। SLD यह केवल शास्त्रीय कंप्यूटर दृष्टि विधियों का उपयोग करके प्राप्त करता है, जिनमें शामिल हैं: AOI, थ्रेशोल्डिंग, कैनी लाइन डिटेक्शन, HoughLinesP, और बिंदु क्लस्टरिंग। इन विधियों का उपयोग करके, वीडियो में (दृष्टिकोण) चलने वाली कार की बाईं और दाईं लेन(ों) की पहचान प्राप्त की जाती है।
सीमाएँ
यह वास्तव में केवल तब सबसे अच्छा काम करता है जब वीडियो डेटा साफ़ हो, AOI में कोई वस्तुएँ/कारें न हों, और सड़क की स्थिति ठीक हो। SLD की एक और बड़ी सीमा यह है कि यह केवल मुख्य वाहन की पहली बाईं और/या पहली दाईं लेन(ों) का ही पता लगा सकता है। यह सभी लेन का पता नहीं लगाएगा, जो कार के समग्र दृष्टिकोण के लिए कोड जो प्रदान कर सकता है उसे सीमित करता है। यहाँ एक आरेख/चित्र है जो SLD के मुख्य मुद्दों को उजागर करता है:
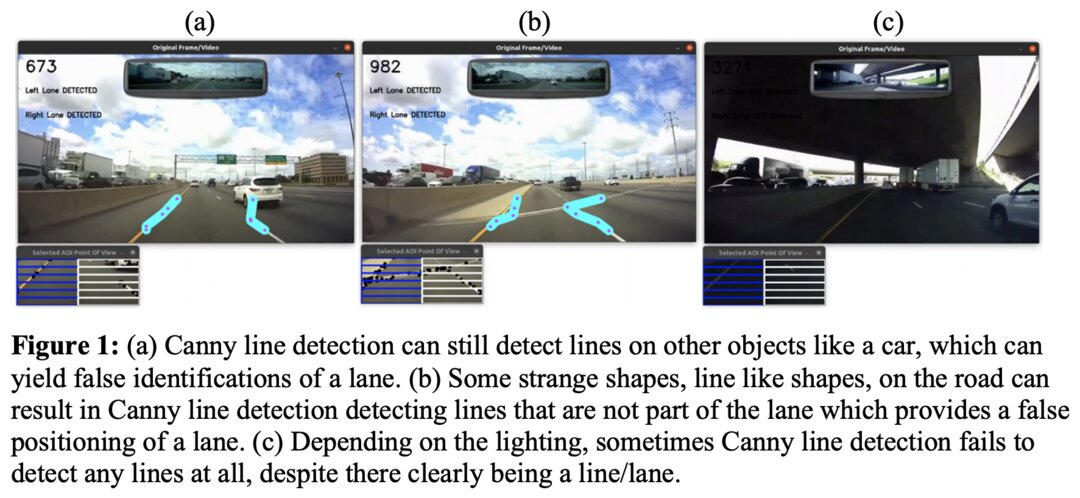
SLD पूर्ण नहीं है!
SLD का डेमो
सभी स्रोत
शोध पत्र
- कंप्यूटर दृष्टि एल्गोरिद्म पर आधारित संरचनात्मक राजमार्ग के लिए उन्नत लेन पहचान तकनीक
- रास्पबेरी पाई और अरडुइनो में स्वायत्त वाहन प्रोटोटाइप के लिए वास्तविक-समय लेन पहचान और गति योजना
- विस्तारित एज-लिंकिंग एल्गोरिद्म पर आधारित वास्तविक-समय लेन विचलन पहचान
ड्राइविंग क्लिप्स
- [बहुत से क्लिप्स को youtube-dl और iMovie का उपयोग करके संपादित किया गया था]
- स्व-चालित कार पूर्ण डेटासेट
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
अन्य स्रोत
- OpenCV कैनी एज डिटेक्शन दस्तावेज़
- OpenCV हफ़ लाइन ट्रांसफ़ॉर्म दस्तावेज़
- OpenCV छवियों को स्मूद करने का दस्तावेज़
- StackOverflow माउस स्थिति क्लिक का पता लगाना - चर्चा
- CSOM की CSCI437 कक्षा से इन फ़ंक्शनों को संशोधित किया गया था और इस प्रोजेक्ट में उपयोग किया गया था:
get_xy() ; create_named_window()