सरल लेन डिटेक्शन
परिचय
Simple lane detection (SLD) जैसा कि नाम से स्पष्ट है, एक सॉफ़्टवेयर है जो सरल लेन डिटेक्शन करता है। SLD यह केवल क्लासिकल कंप्यूटर विज़न विधियों का उपयोग करके प्राप्त करता है, जिसमें शामिल हैं: AOI, थ्रेशहोल्डिंग, Canny लाइन डिटेक्शन, HoughLinesP, और पॉइंट क्लस्टरिंग। इन विधियों का उपयोग करके, वीडियो (दृष्टिकोण) में चलती कार की बाएँ और दाएँ लेन(ओं) का पता लगाया जाता है।
सीमाएँ
यह वास्तव में केवल तभी सबसे अच्छा काम करता है जब वीडियो डेटा साफ़ हो, AOI में कोई वस्तु/कार न हो, और सड़क की स्थिति ठीक हो। SLD की एक और बड़ी सीमा यह है कि यह केवल मुख्य वाहन की पहली बाएँ और/या पहली दाएँ लेन(ओं) का पता लगा सकता है। यह सभी लेन का पता नहीं लगा पाएगा, जिससे कोड कार के समग्र दृष्टिकोण के लिए जो प्रदान कर सकता है, वह सीमित हो जाता है। यहाँ एक आरेख/चित्र है जो SLD की मुख्य समस्याओं को उजागर करता है:
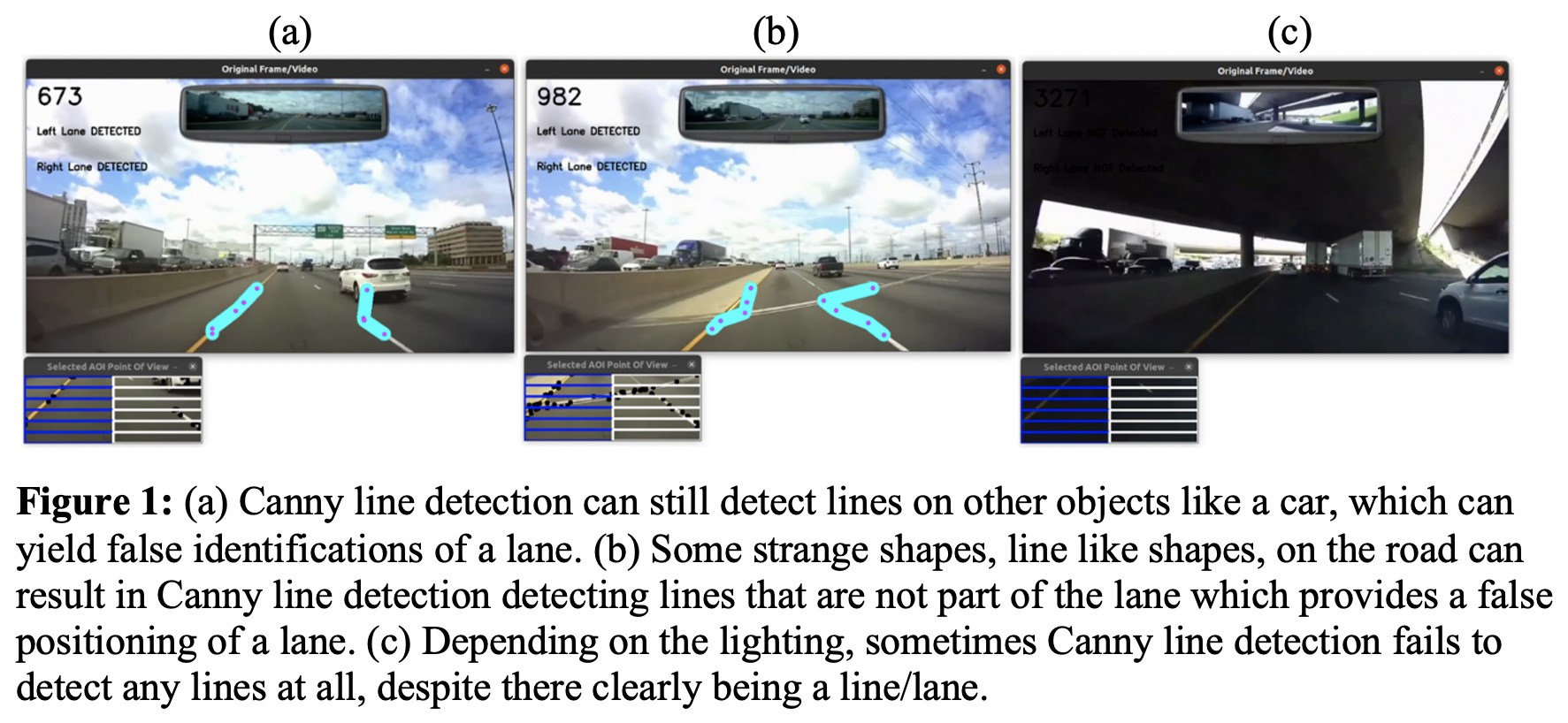
SLD पूर्ण नहीं है!
SLD का डेमो

सभी स्रोत
शोध पत्र
- कंप्यूटर विज़न एल्गोरिदम पर आधारित संरचनात्मक हाईवे के लिए उन्नत लेन डिटेक्शन तकनीक
- ऑटोनॉमस वाहन प्रोटोटाइप के लिए Raspberry Pi और Arduino में रीयल-टाइम लेन डिटेक्शन और मोशन प्लानिंग
- विस्तारित एज-लिंकिंग एल्गोरिदम पर आधारित रीयल-टाइम लेन डिपार्चर डिटेक्शन
ड्राइविंग क्लिप्स
- कई क्लिप्स को youtube-dl और iMovie का उपयोग करके संपादित किया गया था
- सेल्फ ड्राइविंग कार पूर्ण डेटासेट
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
अन्य स्रोत
- OpenCV Canny एज डिटेक्शन दस्तावेज़
- OpenCV Hough लाइन ट्रांसफ़ॉर्म दस्तावेज़
- OpenCV इमेज स्मूथिंग दस्तावेज़
- StackOverflow माउस पोज़िशन क्लिक डिटेक्ट - चर्चा
- CSOM की CSCI437 क्लास की ये फ़ंक्शन इस प्रोजेक्ट में संशोधित और उपयोग किए गए:
get_xy() ; create_named_window()