Détection simple de voie

À propos
La détection simple de voie (SLD) est, comme son nom l’indique, un logiciel qui effectue une détection simple de voie. SLD y parvient en utilisant uniquement des méthodes classiques de vision par ordinateur, consistant en : AOI, seuillage, détection de lignes Canny, HoughLinesP et regroupement de points. Grâce à ces méthodes, la détection de la ou des voies gauche et droite du véhicule qui conduit dans la vidéo (point de vue) est réalisée.
Limitations
Cela ne fonctionne vraiment au mieux que si les données vidéo sont propres, qu’il n’y a aucun objet/voiture dans l’AOI, et que la route est dans un état correct. Une autre grande limitation de SLD est qu’il ne peut détecter que la première voie gauche et/ou la première voie droite du véhicule principal. Il ne détectera pas toutes les voies, ce qui limite ce que le code peut fournir pour le point de vue global de la voiture. Voici un schéma/figure qui met en évidence les principaux problèmes de SLD :
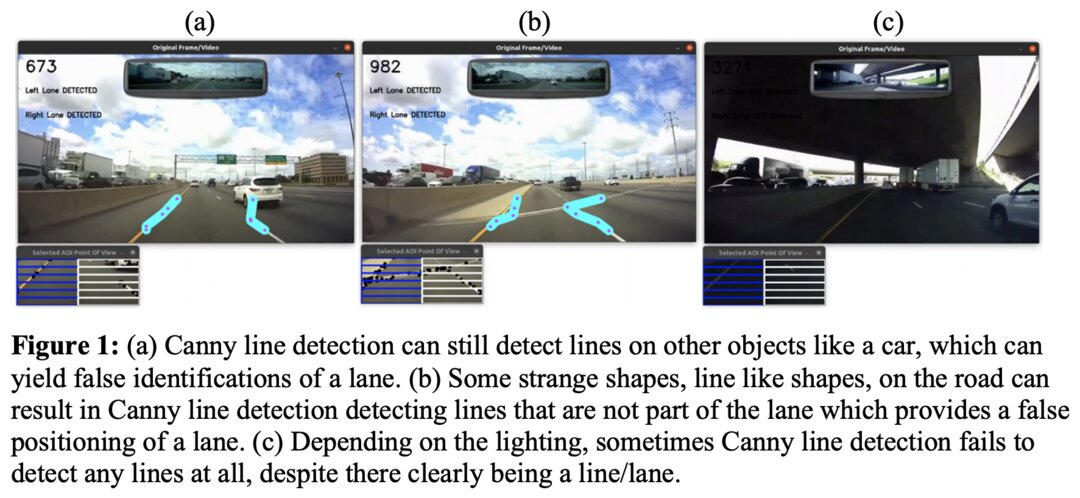
SLD n’est PAS parfait !
Démo de SLD
Toutes les sources
Articles de recherche
- Technique avancée de détection de voie pour autoroute structurée basée sur un algorithme de vision par ordinateur
- Détection de voie en temps réel et planification de mouvement sur Raspberry Pi et Arduino pour un prototype de véhicule autonome
- Détection du départ de voie en temps réel basée sur un algorithme étendu de liaison des contours
Extraits de conduite
- De nombreux extraits ont été montés à l’aide de youtube-dl et iMovie
- Jeu de données complet de voiture autonome
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Autres sources
- Doc OpenCV de détection de contours Canny
- Doc OpenCV de transformation de lignes de Hough
- Doc OpenCV de lissage d’images
- StackOverflow Détecter la position de la souris au clic - Discussion
- Ces fonctions de la classe CSCI437 de CSOM ont été modifiées et utilisées dans ce projet :
get_xy() ; create_named_window()