Detección Simple de Carril
Repositorio GitHub del proyecto
Acerca de
La detección simple de carril (SLD) es, como su nombre indica, un software que realiza detección simple de carril. SLD logra esto usando únicamente métodos clásicos de visión por computadora, que consisten en: AOI, umbralizado, detección de líneas Canny, HoughLinesP y agrupamiento de puntos. Con estos métodos, se logra la detección del(los) carril(es) izquierdo y derecho del coche que conduce en el video (punto de vista).
Limitaciones
Realmente solo funciona mejor si los datos de video están limpios, no hay objetos/coches en el AOI y la carretera está en condiciones aceptables. Otra gran limitación de SLD es que solo puede detectar el primer carril izquierdo y/o el primer carril derecho del vehículo principal. No detectará todos los carriles, lo que limita lo que el código puede proporcionar para la visión general del coche. Aquí hay un diagrama/figura que destaca los principales problemas con SLD:
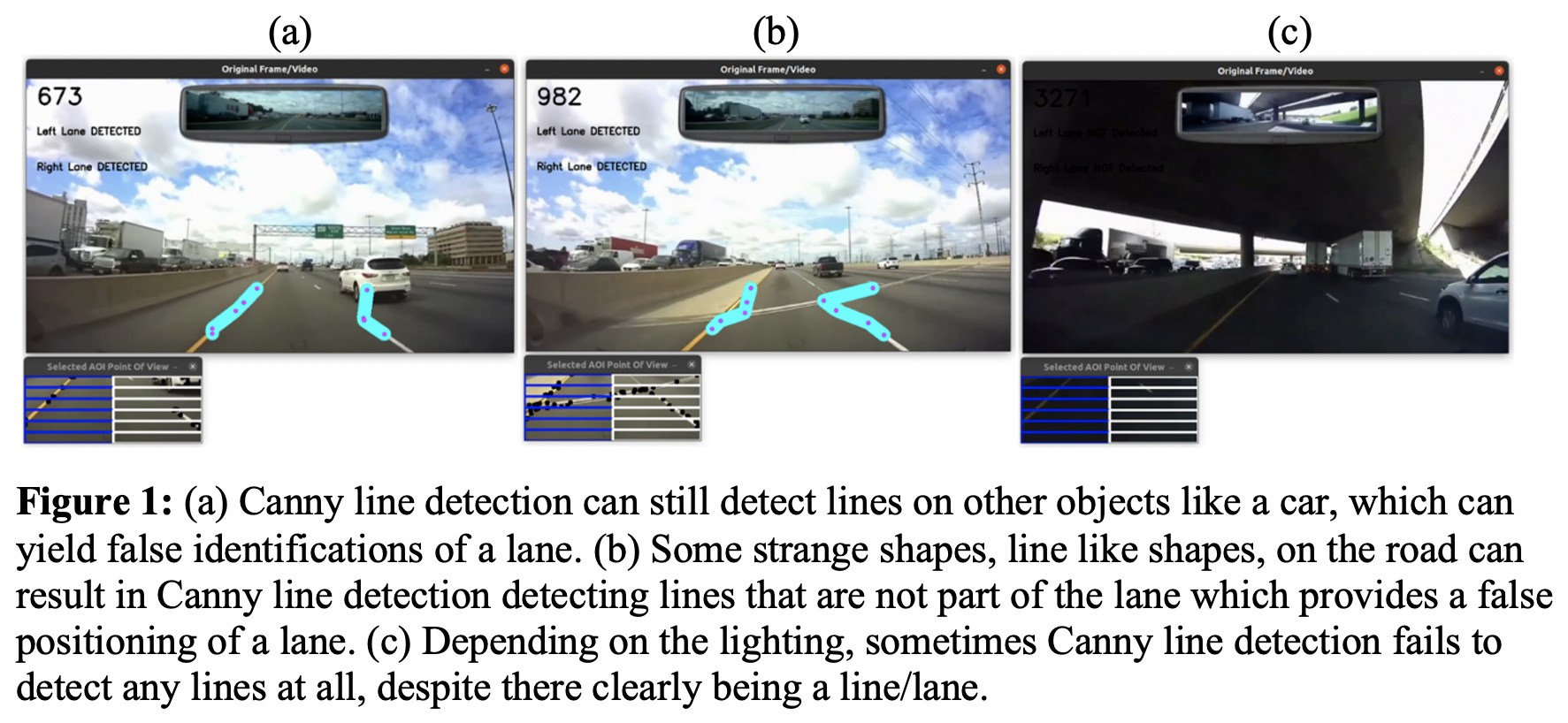
¡SLD NO es perfecto!
Demostración de SLD

Todas las Fuentes
Artículos de Investigación
- Técnica avanzada de detección de carril para autopista estructural basada en algoritmo de visión por computadora
- Detección de carril en tiempo real y planificación de movimiento en Raspberry Pi y Arduino para un prototipo de vehículo autónomo
- Detección en tiempo real de salida de carril basada en algoritmo extendido de enlace de bordes
Clips de Conducción
- Muchos clips fueron editados usando youtube-dl y iMovie
- Conjunto de datos completo de coche autónomo
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Otras Fuentes
- Documentación de Detección de Bordes Canny de OpenCV
- Documentación de Transformada de Línea Hough de OpenCV
- Documentación de Suavizado de Imágenes de OpenCV
- StackOverflow Detectar Clic de Posición del Ratón - Discusión
- Estas funciones de la clase CSCI437 de CSOM fueron modificadas y usadas en este proyecto:
get_xy() ; create_named_window()