Einfache Spurenerkennung

Über
Einfache Spurenerkennung (SLD) ist, wie der Name schon sagt, eine Software, die eine einfache Spurenerkennung durchführt. SLD erreicht dies, indem es nur klassische Methoden der Computer Vision verwendet, bestehend aus: AOI, Schwellenwertbildung, Canny-Liniendetektion, HoughLinesP und Punkt-Clustering. Mit diesen Methoden wird die Erkennung der linken und rechten Spur(en) des fahrenden Autos im Video (Standpunkt) erreicht.
Einschränkungen
Es funktioniert wirklich nur am besten, wenn die Videodaten sauber sind, sich keine Objekte/Autos in der AOI befinden und die Straße in ordentlichem Zustand ist. Eine weitere große Einschränkung von SLD ist, dass es nur die erste linke und/oder erste rechte Spur(en) des Hauptfahrzeugs erkennen kann. Es wird nicht alle Spuren erkennen, was einschränkt, was der Code für den gesamten Blickwinkel des Autos liefern kann. Hier ist ein Diagramm/eine Abbildung, die die Hauptprobleme mit SLD hervorhebt:
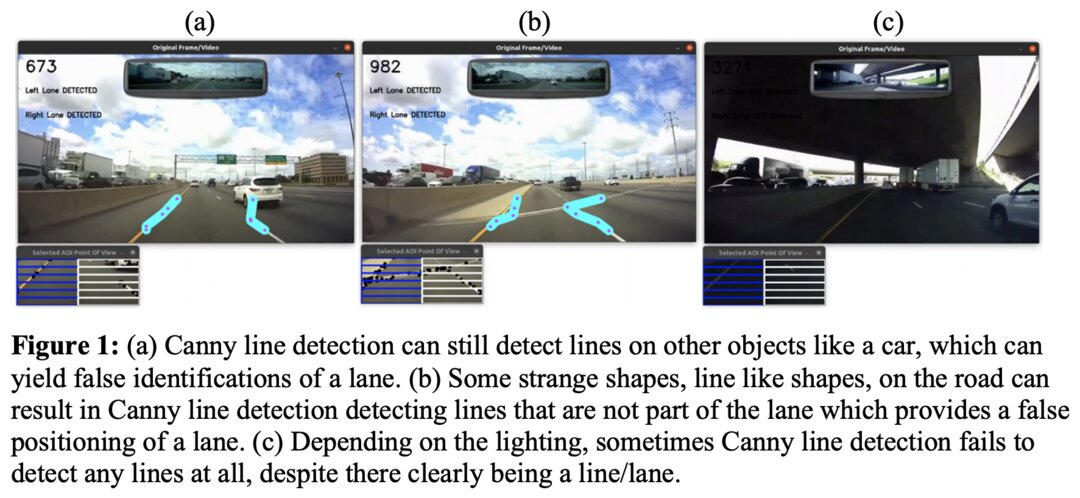
SLD ist NICHT perfekt!
Demo von SLD
Alle Quellen
Forschungspapiere
- Fortgeschrittene Spurenerkennungstechnik für strukturierte Autobahnen auf Basis eines Computer-Vision-Algorithmus
- Echtzeit-Spurenerkennung und Bewegungsplanung in Raspberry Pi und Arduino für einen autonomen Fahrzeugprototyp
- Echtzeit-Spurverlassens-Erkennung auf Basis eines erweiterten Kantenverknüpfungsalgorithmus
Fahrclips
- Viele Clips wurden mit youtube-dl und iMovie bearbeitet
- Vollständiger Datensatz für selbstfahrende Autos
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Andere Quellen
- OpenCV-Dokumentation zur Canny-Kantenerkennung
- OpenCV-Dokumentation zur Hough-Linien-Transformation
- OpenCV-Dokumentation zum Glätten von Bildern
- StackOverflow: Mausklick-Position erkennen – Diskussion
- Diese Funktionen aus der CSCI437-Klasse von CSOM wurden in diesem Projekt geändert und verwendet:
get_xy() ; create_named_window()