Einfache Fahrbahnverkennung
Über
Einfache Fahrbahnverkennung (SLD) ist, wie der Name schon sagt, eine Software, die einfache Fahrbahnverkennung durchführt. SLD erreicht dies, indem es nur klassische Methoden der Computer Vision verwendet, die aus: AOI, Schwellenwertbestimmung, Canny-Linienerkennung, HoughLinesP und Punktclustering bestehen. Mit diesen Methoden wird die Erkennung der linken und rechten Fahrbahn(en) des fahrenden Autos im Video (Sichtpunkt) erreicht.
Einschränkungen
Es funktioniert wirklich am besten, wenn die Videodaten sauber sind, keine Objekte/Autos im AOI sind und die Straße in einem akzeptablen Zustand ist. Eine weitere große Einschränkung von SLD ist, dass es nur die erste linke und/oder erste rechte Fahrbahn(en) des Hauptfahrzeugs erkennen kann. Es wird nicht alle Fahrbahnen erkennen, was die Möglichkeiten des Codes für den Gesamtblickwinkel des Autos einschränkt. Hier ist ein Diagramm/eine Abbildung, die die Hauptprobleme mit SLD hervorhebt:
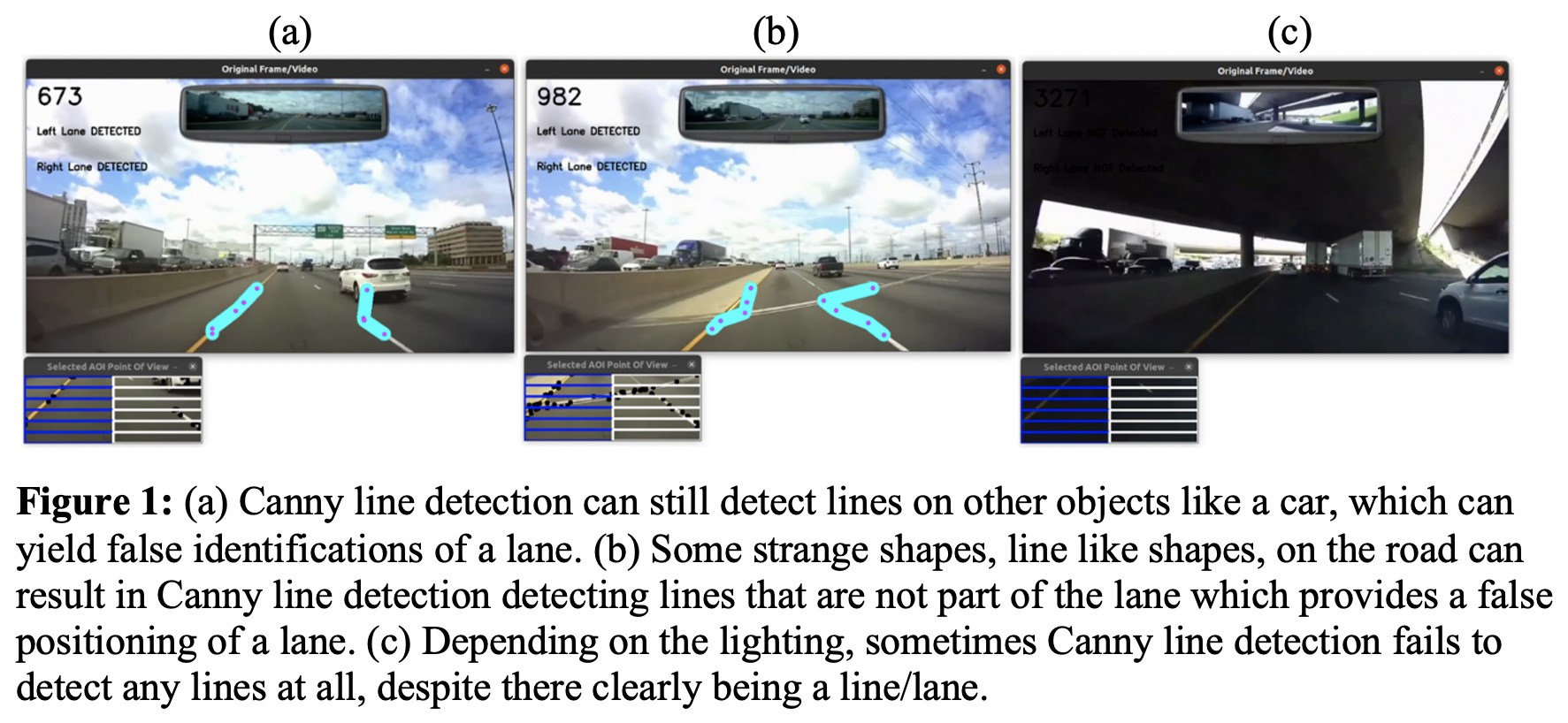
SLD ist NICHT perfekt!
Demo von SLD

Alle Quellen
Forschungsarbeiten
- Fortgeschrittene Fahrbahnverkennungstechnik für strukturelle Autobahnen basierend auf einem Computer-Vision-Algorithmus
- Echtzeit-Fahrbahnverkennung und Bewegungsplanung in Raspberry Pi und Arduino für einen Prototyp eines autonomen Fahrzeugs
- Echtzeit-Fahrbahnverlassensdetektion basierend auf einem erweiterten Kantenverknüpfungsalgorithmus
Fahrclips
- Viele Clips wurden mit youtube-dl und iMovie bearbeitet
- Kompletter Datensatz für selbstfahrende Autos
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
Weitere Quellen
- OpenCV Canny-Kantenerkennung Dokumentation
- OpenCV Hough-Linien-Transformationsdokumentation
- OpenCV Bildglättung Dokumentation
- StackOverflow Mauspositionserkennung - Diskussion
- Diese Funktionen aus dem CSCI437-Kurs von CSOM wurden modifiziert und in diesem Projekt verwendet:
get_xy() ; create_named_window()