সহজ লেন সনাক্তকরণ
সম্পর্কে
Simple lane detection (SLD) হল, নাম অনুযায়ী, এমন একটি সফটওয়্যার যা সহজ লেন সনাক্তকরণ করে। SLD এটি অর্জন করে কেবল পারম্পরিক কম্পিউটার ভিশন পদ্ধতিগুলি ব্যবহার করে, যা অন্তর্ভুক্ত: AOI, Thresholding, Canny line detection, HoughLinesP, & point clustering। এই পদ্ধতিগুলি ব্যবহার করে ভিডিওতে (দৃষ্টিকোণ থেকে) ড্রাইভিং গাড়ির বাম এবং ডান লেন(গুলো) সনাক্ত করা যায়।
সীমাবদ্ধতা
এটি সত্যিই শুধুমাত্র তখনই ভালো কাজ করে যখন ভিডিও ডেটা পরিষ্কার থাকে, AOI-তে কোনও বস্তু/গাড়ি না থাকে, এবং রাস্তা উপযুক্ত অবস্থায় থাকে। SLD-এর আরেকটি বড় সীমাবদ্ধতা হল যে এটি কেবল মূল যানবাহনের প্রথম বাম এবং/অথবা প্রথম ডান লেন(গুলো)ই সনাক্ত করতে পারে। এটি সমস্ত লেন সনাক্ত করবে না, যা কোডটি গাড়ির সামগ্রিক দৃষ্টিকোণের জন্য কী দিতে পারে তা সীমিত করে। নিচে একটি চিত্র/রেখাচিত্র রয়েছে যা SLD-র প্রধান সমস্যাগুলোকে হাইলাইট করে:
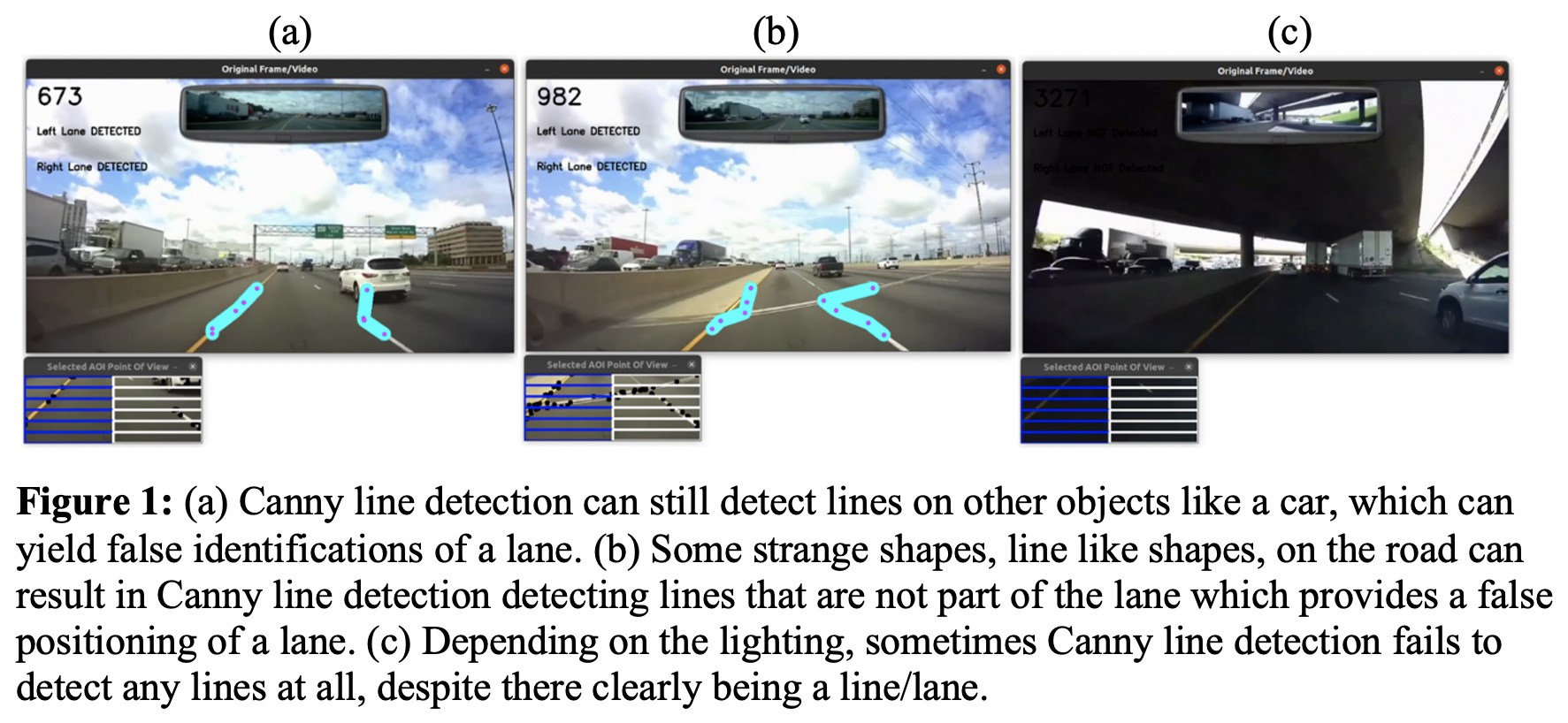
SLD নিখুঁত নয়!
SLD-এর ডেমো

সমস্ত উৎস
গবেষণাপত্রসমূহ
- কম্পিউটার ভিশন অ্যালগরিদমের উপর ভিত্তি করে কাঠামোগত হাইওয়ের জন্য উন্নত লেন সনাক্তকরণ প্রযুক্তি
- অটোনোমাস যানবাহন প্রোটোটাইপের জন্য Raspberry Pi এবং Arduino-এ রিয়েল-টাইম লেন সনাক্তকরণ এবং মোশন প্ল্যানিং
- বর্ধিত এজ-লিংকিং অ্যালগরিদমের উপর ভিত্তি করে রিয়েল-টাইম লেন ডিপারচার সনাক্তকরণ
ড্রাইভিং ক্লিপস
- অনেক ক্লিপ youtube-dl এবং iMovie ব্যবহার করে সম্পাদিত করা হয়েছে
- স্বয়ংচালিত গাড়ি সম্পূর্ণ ডেটাসেট
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
অন্যান্য উৎস
- OpenCV Canny Edge Detection Doc
- OpenCV Hough Line Transform Doc
- OpenCV Smoothing Images Doc
- StackOverflow Detect Mouse Position Click - Discussion
- CSOM-এর CSCI437 ক্লাস থেকে এই ফাংশনগুলো এই প্রকল্পে পরিবর্তন করে ব্যবহার করা হয়েছে:
get_xy() ; create_named_window()