اكتشاف المسارات البسيط

حول
اكتشاف المسارات البسيط (SLD) هو، كما يوحي الاسم، برنامج يقوم باكتشاف المسارات بشكل بسيط. يحقق SLD ذلك باستخدام أساليب الرؤية الحاسوبية الكلاسيكية فقط، والمكوّنة من: AOI، والعتبة، واكتشاف خطوط Canny، وHoughLinesP، وتجميع النقاط. باستخدام هذه الأساليب، يتم تحقيق اكتشاف المسار الأيسر و/أو الأيمن للسيارة المارة في الفيديو (منظور الرؤية).
القيود
إنه يعمل حقًا بأفضل شكل فقط إذا كانت بيانات الفيديو نظيفة، ولا توجد أشياء/سيارات في AOI، وكان الطريق في حالة جيدة. قيد كبير آخر في SLD هو أنه لا يستطيع اكتشاف سوى أول مسار أيسر و/أو أول مسار أيمن للسيارة الرئيسية. لن يكتشف جميع المسارات، مما يحد مما يمكن أن يقدمه الكود بالنسبة لمنظور السيارة العام. إليك مخطط/شكل يبرز المشكلات الرئيسية في SLD:
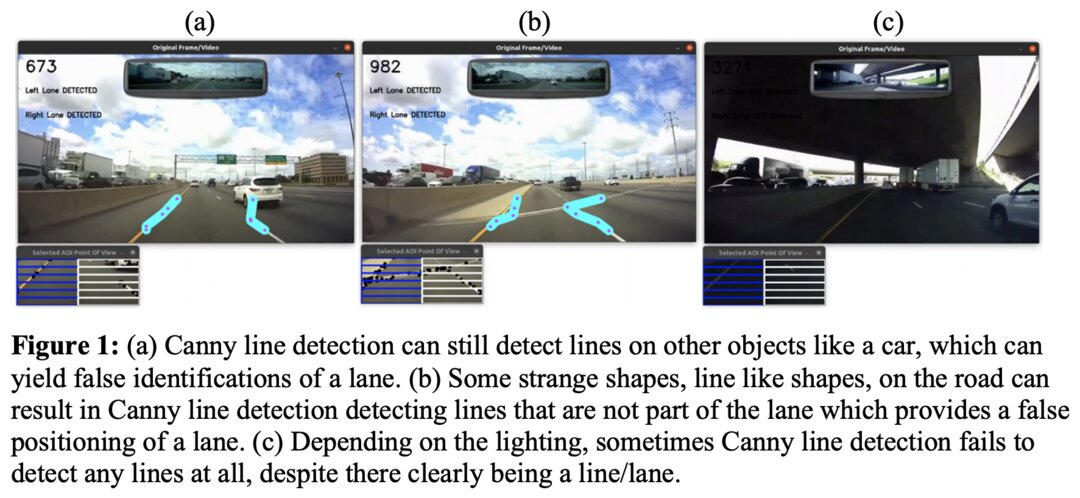
SLD ليس مثاليًا!
عرض توضيحي لـ SLD
جميع المصادر
أوراق بحثية
- تقنية متقدمة لاكتشاف المسارات للبنية التحتية للطرق السريعة استنادًا إلى خوارزمية الرؤية الحاسوبية
- اكتشاف المسارات في الوقت الحقيقي وتخطيط الحركة في Raspberry Pi وArduino لنموذج أولي لمركبة ذاتية القيادة
- اكتشاف مغادرة المسار في الوقت الحقيقي استنادًا إلى خوارزمية ربط الحواف الممتدة
مقاطع القيادة
- تم تحرير العديد من المقاطع باستخدام youtube-dl وiMovie
- مجموعة بيانات كاملة لسيارة ذاتية القيادة
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
مصادر أخرى
- مستند اكتشاف الحواف باستخدام Canny في OpenCV
- مستند تحويل خطوط Hough في OpenCV
- مستند تنعيم الصور في OpenCV
- مناقشة StackOverflow: اكتشاف موضع النقر بالفأرة - نقاش
- تم تعديل هذه الدوال من فصل CSCI437 في CSOM واستخدامها في هذا المشروع:
get_xy() ; create_named_window()