اكتشاف المسار البسيط
حول
اكتشاف المسار البسيط (SLD) هو، كما يشير الاسم، برنامج يقوم باكتشاف المسارات البسيطة. يحقق SLD ذلك باستخدام طرق الرؤية الحاسوبية الكلاسيكية فقط، والتي تتضمن: AOI، العتبة، اكتشاف خطوط Canny، HoughLinesP، وتجمع النقاط. باستخدام هذه الطرق، يتم اكتشاف المسار (المسارات) اليسرى واليمنى للسيارة المتحركة في الفيديو (من منظورها).
القيود
في الواقع يعمل بشكل أفضل فقط إذا كانت بيانات الفيديو نظيفة، ولا توجد كائنات/سيارات في منطقة الاهتمام (AOI)، والطريق في حالة جيدة. قيد كبير آخر لـ SLD هو أنه لا يمكنه إلا اكتشاف أول مسار أيسر و/أو أول مسار أيمن للمركبة الرئيسية. لن يكتشف جميع المسارات، مما يحد مما يمكن للكود أن يقدمه من منظور شامل للسيارة. إليكم مخطط/شكل يبرز المشكلات الرئيسية في SLD:
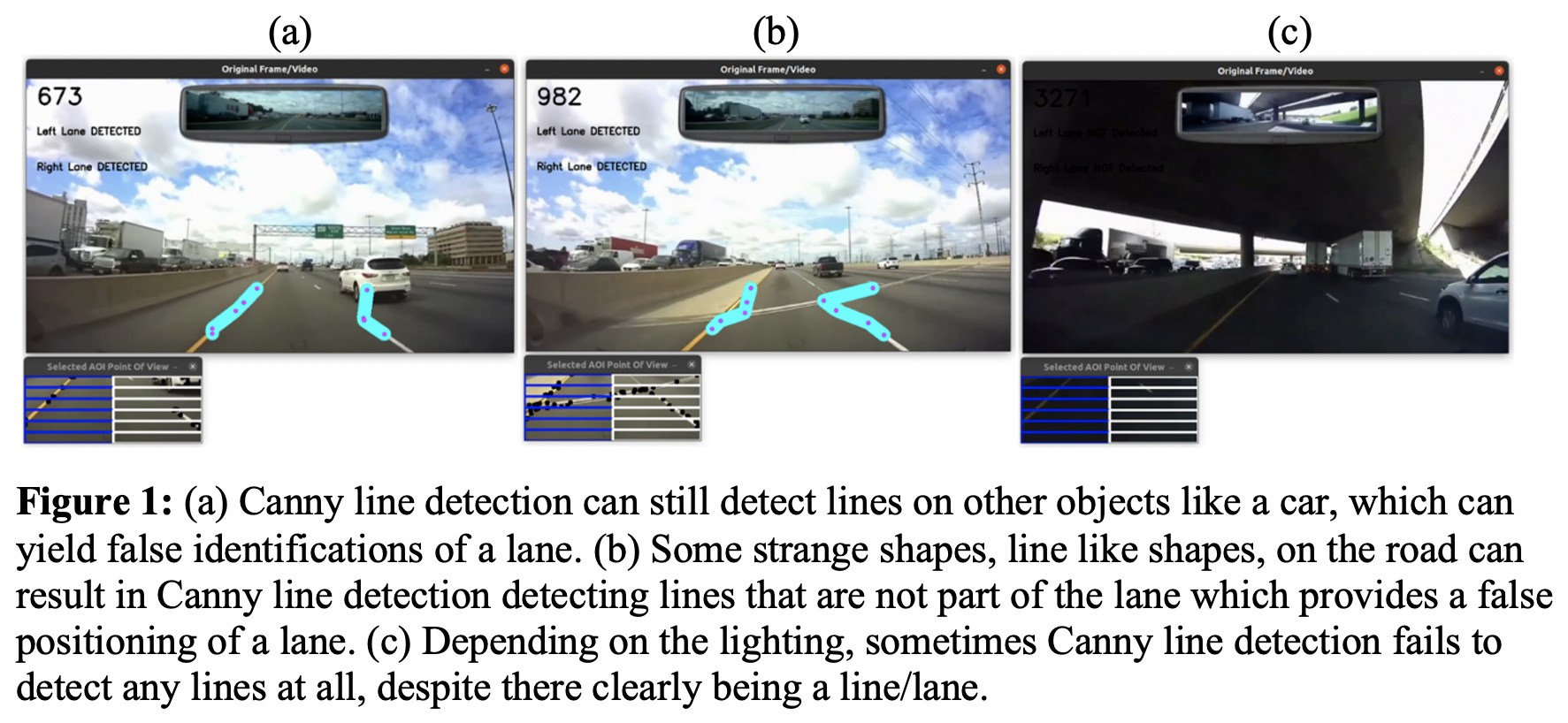
SLD ليس مثالياً!
عرض توضيحي لـ SLD

جميع المصادر
أوراق البحث
- تقنية متقدمة لاكتشاف المسارات للطرق السريعة الهيكلية بناءً على خوارزمية الرؤية الحاسوبية
- اكتشاف المسارات في الوقت الحقيقي وتخطيط الحركة على Raspberry Pi و Arduino لنموذج أولي لمركبة ذاتية القيادة
- اكتشاف الانحراف عن المسار في الوقت الحقيقي بناءً على خوارزمية ربط الحواف الموسعة
مقاطع القيادة
- تم تعديل العديد من المقاطع باستخدام youtube-dl و iMovie
- مجموعة بيانات السيارة ذاتية القيادة الكاملة
- cal_freeway
- delihi_drive
- mout_drive
- missi_drive
- toronto_way
- toronto_longer
- seattle_streets
مصادر أخرى
- وثيقة اكتشاف حواف Canny في OpenCV
- وثيقة تحويل خطوط Hough في OpenCV
- وثيقة تنعيم الصور في OpenCV
- مناقشة StackOverflow حول اكتشاف نقر موقع الفأرة
- تم تعديل واستخدام هذه الدوال من صف CSOM CSCI437 في هذا المشروع:
get_xy() ; create_named_window()